

 & double shaft - 300 rpm")
 & double shaft - 300 rpm")
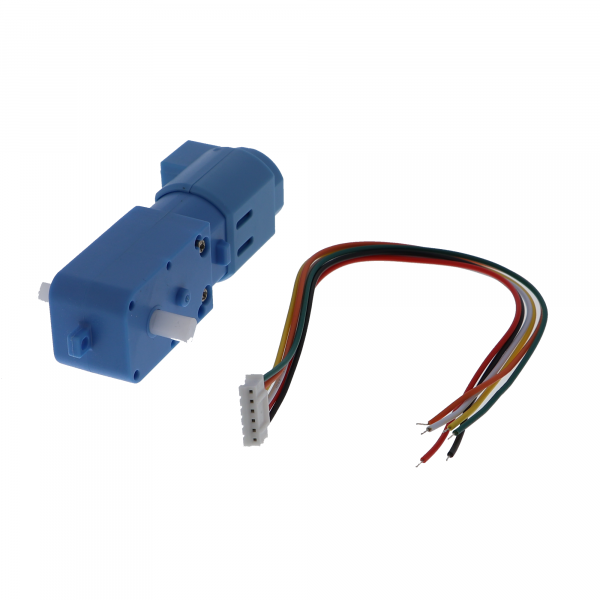
TT geared motor with Hall encoder (AB) & double shaft - 300 rpm

€8.74 *
Content:
1 Piece
incl. VAT plus shipping costs
34 Piece in stock
Delivery time: 1-3 business days
We are known for
- Fast shipping across Germany
- 100,000+ satisfied customers
- Over 10 years of experience









- Item no: F23105692
- Weight: 0,04 kg
- Packing dimensions: 8 cm x 2.2 cm x 2.5 cm (L x W x H)
€8.74 *
TT geared motor with Hall encoder (AB) & double shaft - 300 rpm
Accessories

")




")





")
