






Unitree G1 - Humanoid robot
incl. VAT plus shipping costs
Delivery time: 14 business days
We are known for
- Fast shipping across Germany
- 100,000+ satisfied customers
- Over 10 years of experience









- Item no: F23110376
- Weight: 50,00 kg




Unitree G1 Humanoid Robot
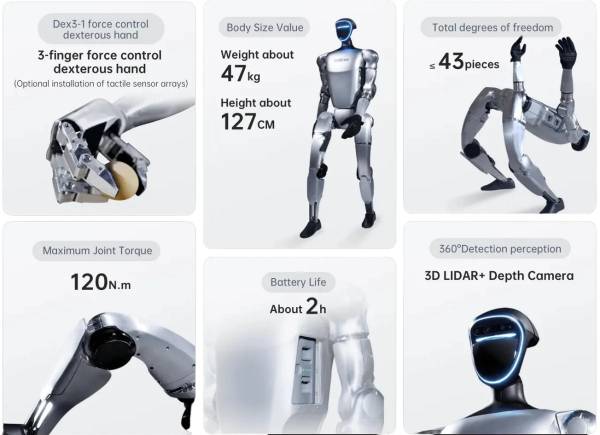
The Unitree G1 is a state-of-the-art humanoid robot that impresses with its remarkable freedom of movement and advanced technology. With an exceptionally high degree of joint mobility and - depending on the version - up to 43 powered degrees of freedom, it significantly exceeds the mobility of an average human.
Through the use of imitation learning and reinforcement learning, the robot is continuously developing its capabilities and thus constantly improving its performance in the field of artificial intelligence.
One particular highlight is the G1's ability to independently raise itself from the ground to a standing position. It stands up without external help and is immediately ready for use again.
Please note:this function is not available if the robot is equipped with hands.
The basic version of the Unitree G1 primarily serves as an impressive demonstration and show model and is ideal for presenting the impressive movement performance, stability and dynamics of the robot live - without any programming effort.
However, if you really want to delve into the depths of robotics research, you should opt for the EDU versions:
Only these versions are fully programmable and offer an open development platform for both high-level and low-level control. This makes it possible to create your own motion sequences, custom control algorithms and complex AI functions.
All EDU models have an integrated NVIDIA Orin NX 16GB computing unit, which provides enormous performance reserves for real-time AI, perception algorithms and machine learning.
- G1 Basic
- Compact dimensions: 1270 × 450 × 200 mm (standing), 690 × 450 × 300 mm (folded)
- Weight: approx. 35 kg
- Degrees of freedom: 23 in total
- Leg: 6 DOF, arm: 5 DOF, waist: 1 DOF
- Maximum knee torque: 90 Nm, arm payload: 2 kg
- Extensive joint movement range (e.g. hip P±154°, knee 0-165°, waist Z-axis ±155°)
- Power supply: 13-battery strings, approx. 2 h runtime
- Basic computing power: 8-core CPU
- Sensors: Depth camera + 3D LiDAR
- Connectivity: WiFi 6, Bluetooth 5.2
- Programming not possible
- EDU-U1 (standard version)
- Based on all functions of the G1 Basic
- Integrated dock with NVIDIA Orin NX 16GB computing power (100 TOPS)
- Programmable, secondary development possible, incl. AI algorithms and technical support
- Maximum knee torque: 120 Nm, arm payload: 3 kg
- Degrees of freedom: 23
- EDU-U2 (Advanced Version)
- Based on EDU-U1 standard version
- Waist: 3 DOF, arm: 7 DOF per arm
- Degrees of freedom: 29
- EDU-U3
- Based on EDU-U2 Advanced Version
- Two Dex3-1 three-fingered force-controlled hands (without tactile sensors)
- Degrees of freedom: 43
- EDU-U4
- Based on EDU-U2 Advanced Version
- Two Dex3-1 three-finger force-controlled hands with tactile sensors
- Degrees of freedom: 43
- EDU-U5
- Based on EDU-U2 Advanced Version
- Two five-finger Dexterity hand models (RH56DFQ-2R, RH56DFQ-2L)
- Degrees of freedom: 41
- EDU-U6
- Based on EDU-U2 Advanced Version
- Two five-finger Dexterity hand models (RH56DFTP-2R, RH56DFTP-2L)
- Degrees of freedom: 41
- Tactile sensors: 17 sensors per hand
- EDU-U7
- Based on EDU-U2 Advanced Version
- Two powerful five-finger Revo 2 Basic hands
- Degrees of freedom: 41
- EDU-U8
- Based on EDU-U1 Standard Version
- Two Dex3-1 three-finger power-controlled hands (without tactile sensors)
- Degrees of freedom: 37
- EDU-U9
- Based on EDU-U1 standard version
- Two Dex3-1 three-finger force-controlled hands with tactile sensors (33 sensors per hand)
- Degrees of freedom: 37
- EDU-U10
- Based on EDU-U1 standard version
- Two powerful five-finger Revo 2 Basic hands
- Degrees of freedom: 35



| Specification | G1 Base | G1 Standard Version | G1 Advanced Version |
|---|---|---|---|
| Dimensions (upright) | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm |
| Dimensions (folded) | 690 × 450 × 300 mm | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Weight (with battery) | approx. 35 kg | approx. 35 kg+ | approx. 35 kg+ |
| Total degrees of freedom | 23 | 23-43 (optional) | 23-43 (extended) |
| DOF waist | 1 | 1 + optional 2 DOF | 3 |
| DOF per arm | 5 | 5 | 7 |
| Hand | - | Hands optional | Hands optional |
| Max. Knee torque | 90 Nm | 120 Nm | 120 Nm |
| Arm load | approx. 2 kg | approx. 3 kg | approx. 3 kg |
| Computing module | 8-core CPU | Jetson Orin NX 16 GB | Jetson Orin NX 16GB |
| Sensor system | Depth camera + 3D LiDAR | Depth camera + 3D LiDAR | Depth camera + 3D LiDAR |
| Programming | No (remote control only) | Yes | Yes - extended |
| Operating time | approx. 2 h | approx. 2 h | approx. 2 h |
| OTA | Yes | Yes | Yes |
Shipping weight: 50.00 kg
Item weight: 35.00 kg
Unitree G1 Humanoid Robot
The Unitree G1 is a state-of-the-art humanoid robot that impresses with its remarkable freedom of movement and advanced technology. With an exceptionally high degree of joint mobility and - depending on the version - up to 43 powered degrees of freedom, it significantly exceeds the mobility of an average human.
Through the use of imitation learning and reinforcement learning, the robot is continuously developing its capabilities and thus constantly improving its performance in the field of artificial intelligence.
One particular highlight is the G1's ability to independently raise itself from the ground to a standing position. It stands up without external help and is immediately ready for use again.
Please note:this function is not available if the robot is equipped with hands.
The basic version of the Unitree G1 primarily serves as an impressive demonstration and show model and is ideal for presenting the impressive movement performance, stability and dynamics of the robot live - without any programming effort.
However, if you really want to delve into the depths of robotics research, you should opt for the EDU versions:
Only these versions are fully programmable and offer an open development platform for both high-level and low-level control. This makes it possible to create your own motion sequences, custom control algorithms and complex AI functions.
All EDU models have an integrated NVIDIA Orin NX 16GB computing unit, which provides enormous performance reserves for real-time AI, perception algorithms and machine learning.
- G1 Basic
- Compact dimensions: 1270 × 450 × 200 mm (standing), 690 × 450 × 300 mm (folded)
- Weight: approx. 35 kg
- Degrees of freedom: 23 in total
- Leg: 6 DOF, arm: 5 DOF, waist: 1 DOF
- Maximum knee torque: 90 Nm, arm payload: 2 kg
- Extensive joint movement range (e.g. hip P±154°, knee 0-165°, waist Z-axis ±155°)
- Power supply: 13-battery strings, approx. 2 h runtime
- Basic computing power: 8-core CPU
- Sensors: Depth camera + 3D LiDAR
- Connectivity: WiFi 6, Bluetooth 5.2
- Programming not possible
- EDU-U1 (standard version)
- Based on all functions of the G1 Basic
- Integrated dock with NVIDIA Orin NX 16GB computing power (100 TOPS)
- Programmable, secondary development possible, incl. AI algorithms and technical support
- Maximum knee torque: 120 Nm, arm payload: 3 kg
- Degrees of freedom: 23
- EDU-U2 (Advanced Version)
- Based on EDU-U1 standard version
- Waist: 3 DOF, arm: 7 DOF per arm
- Degrees of freedom: 29
- EDU-U3
- Based on EDU-U2 Advanced Version
- Two Dex3-1 three-fingered force-controlled hands (without tactile sensors)
- Degrees of freedom: 43
- EDU-U4
- Based on EDU-U2 Advanced Version
- Two Dex3-1 three-finger force-controlled hands with tactile sensors
- Degrees of freedom: 43
- EDU-U5
- Based on EDU-U2 Advanced Version
- Two five-finger Dexterity hand models (RH56DFQ-2R, RH56DFQ-2L)
- Degrees of freedom: 41
- EDU-U6
- Based on EDU-U2 Advanced Version
- Two five-finger Dexterity hand models (RH56DFTP-2R, RH56DFTP-2L)
- Degrees of freedom: 41
- Tactile sensors: 17 sensors per hand
- EDU-U7
- Based on EDU-U2 Advanced Version
- Two powerful five-finger Revo 2 Basic hands
- Degrees of freedom: 41
- EDU-U8
- Based on EDU-U1 Standard Version
- Two Dex3-1 three-finger power-controlled hands (without tactile sensors)
- Degrees of freedom: 37
- EDU-U9
- Based on EDU-U1 standard version
- Two Dex3-1 three-finger force-controlled hands with tactile sensors (33 sensors per hand)
- Degrees of freedom: 37
- EDU-U10
- Based on EDU-U1 standard version
- Two powerful five-finger Revo 2 Basic hands
- Degrees of freedom: 35
| Specification | G1 Base | G1 Standard Version | G1 Advanced Version |
|---|---|---|---|
| Dimensions (upright) | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm |
| Dimensions (folded) | 690 × 450 × 300 mm | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Weight (with battery) | approx. 35 kg | approx. 35 kg+ | approx. 35 kg+ |
| Total degrees of freedom | 23 | 23-43 (optional) | 23-43 (extended) |
| DOF waist | 1 | 1 + optional 2 DOF | 3 |
| DOF per arm | 5 | 5 | 7 |
| Hand | - | Hands optional | Hands optional |
| Max. Knee torque | 90 Nm | 120 Nm | 120 Nm |
| Arm load | approx. 2 kg | approx. 3 kg | approx. 3 kg |
| Computing module | 8-core CPU | Jetson Orin NX 16 GB | Jetson Orin NX 16GB |
| Sensor system | Depth camera + 3D LiDAR | Depth camera + 3D LiDAR | Depth camera + 3D LiDAR |
| Programming | No (remote control only) | Yes | Yes - extended |
| Operating time | approx. 2 h | approx. 2 h | approx. 2 h |
| OTA | Yes | Yes | Yes |
Shipping weight: 50.00 kg
Item weight: 35.00 kg





 filament - various colors")



