
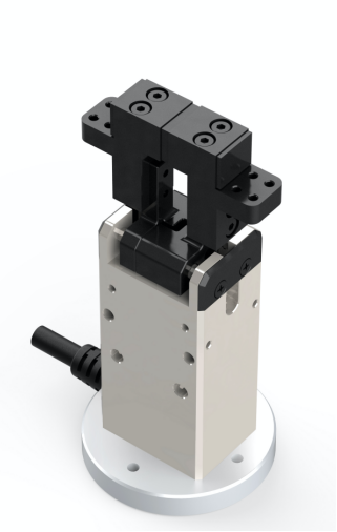











Mini electromagnetic gripper for DOBOT MG400
€414.00 *
Content:
1 Piece
incl. VAT plus shipping costs
Delivery time: 1-3 business days
We are known for
- Electromagnetic mini gripper for DOBOT MG400
- For pick-and-place with ferromagnetic workpieces
- Compact design for desktop, laboratory and training applications









- Item no: F23107336
- Weight: 0,40 kg
€414.00 *
Mini electromagnetic gripper for DOBOT MG400
Accessories
- 16%

- 16%

")



- 19%

- 27%
