

 & dubbele as - 300 rpm")
 & dubbele as - 300 rpm")
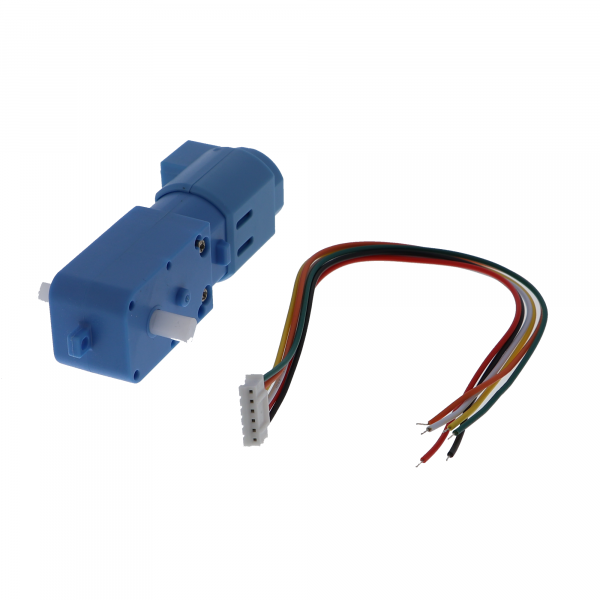
TT motorreductor met Hall-encoder (AB) & dubbele as - 300 rpm

€ 8,74 *
Inhoud:
1 Stück
incl. BTW plus verzendkosten
34 Stuk op voorraad
Levertijd: 1-3 werkdagen
We staan bekend om
- Snelle verzending vanuit Duitsland
- 100.000+ tevreden klanten
- Meer dan 10 jaar ervaring









- Artikelnr: F23105692
- Gewicht: 0,04 kg
- Afmetingen verpakking: 8 cm x 2.2 cm x 2.5 cm (L x B x H)
€ 8,74 *
TT motorreductor met Hall-encoder (AB) & dubbele as - 300 rpm
Accessoires

")




")





")
