
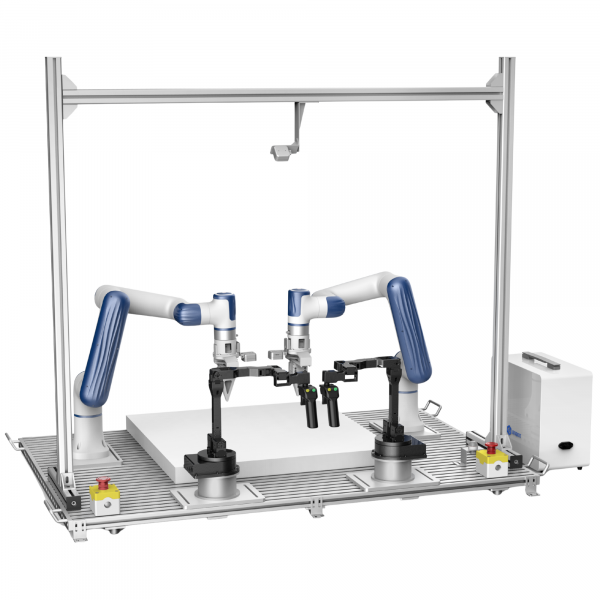








Dobot X-Trainer / Teleoperation robot
€33,390.00 *
Content:
1 Piece
incl. VAT plus shipping costs
Delivery time: 21 business days
We are known for
- Dual-arm teleoperation for AI training
- Ideal for imitation learning and data acquisition
- With camera system and open APIs for development









- Item no: F25111125
€33,390.00 *
Dobot X-Trainer / Teleoperation robot
Accessories
