

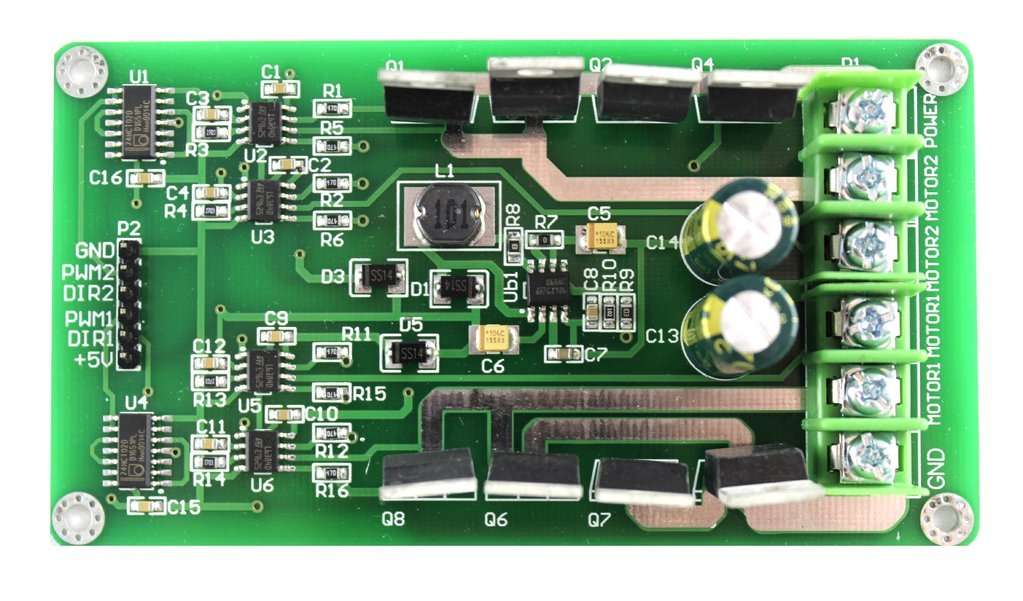



30A H-Brücke mit IRF3205 MOSFET Transistoren

21,14 € *
Inhalt:
1 Stück
inkl. MwSt. zzgl. Versandkosten
15 Stück lagernd
Lieferzeit: 1-3 Werktage
- Blitzversand aus Deutschland
- Kompetente Beratung bei Fragen
- Über 10 Jahre Erfahrung









- Artikel-Nr.: F23108636
- Gewicht: 0,06 kg
- Verpackungsmaße: 10.8 cm x 6.5 cm x 2.2 cm (L x B x H)
21,14 € *
30A H-Brücke mit IRF3205 MOSFET Transistoren
Zubehör
TIPP!

")
")
 mit 830 Kontakten")

")

 - 100cm")



, Gewindestange")






- 20%
")

")






- 10%

Inhalt
1 Stück
ab 2,01 €
*
2,23 €
*







- 10%





