

Ursprung von PWM-Drehzahlreglern
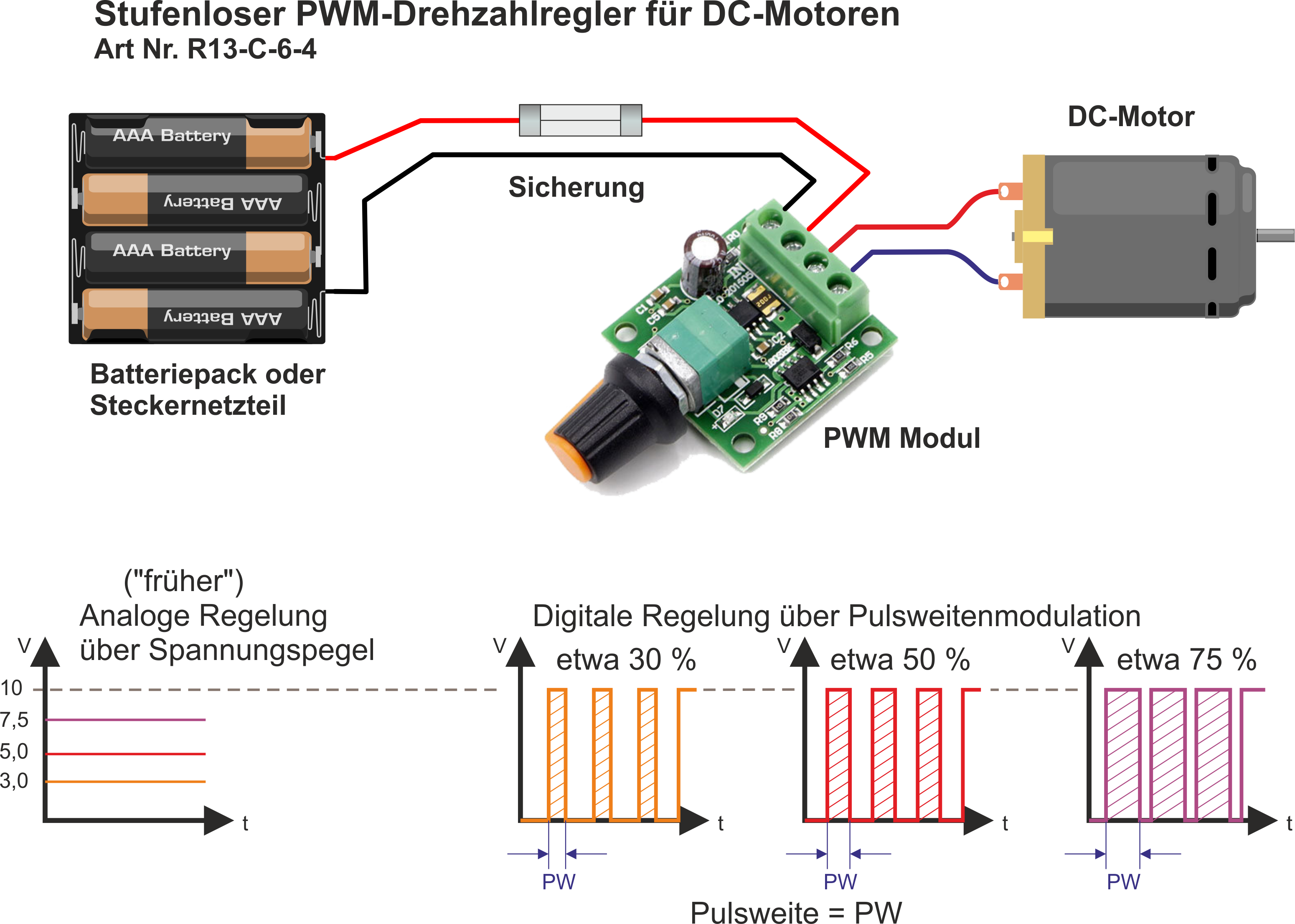
Vor Entwicklung der Leistungselektronik wurde die Drehzahlregelung von (bürsten behafteten) Gleichstrommotoren mit Linearreglern oder Vorwiderständen gelöst. Bildlich gesprochen hat man die Spannung (und dadurch auch den Strom) reduziert, um die Drehzahl zu ändern.
Das hat jedoch einige Nachteile, die vor allem im Batteriebetrieb zutage treten. Spannung und Strom werden an der Regeleinheit (oder dem Widerstand) in (ungenutzte) Wärmeenergie ("verbraten") umgewandelt.
Der Gesamtverbrauch bleibt sehr hoch, während die nutzbare Leistung weniger wird. Da das Drehmoment vom Stromfluss abhängt, bricht auch dieses ein.
So funktionieren PWM-Drehzahlregler
Mit (Weiter)Entwicklung der Leistungselektronik ist man mit einer anderen Idee an die Problematik herangegangen. Durch (sehr) schnelles Ein- und Ausschalten der Versorgungsspannung "pulst" man die Spannung (und damit den Strom). Am (elektronischen) Schalter fällt in der "AUS"-Zeit keine Leistung ab. Dadurch entstehen an der Regelung (fast) keine Verluste mehr.
In der "EIN"-Zeit liegt die VOLLE Spannung am Motor an. Dadurch ist der Strom - und damit das Drehmoment entsprechend hoch. Leider ist ein Motor mit seinen Spulen und dem Eisenkern kein idealer ohmscher Verbraucher, weshalb diese Aussage physikalisch gesehen nicht völlig richtig ist.
Die Kombination aus Spuleninduktivität und Motorträgheit hilft allerdings bei der Glättung der Drehzahl, sodass sich der Motor so verhält, als würde er mit kontinuierlicher Gleichspannung betrieben.
Damit sind wir auch schon bei den Nachteilen der PulsWeitenModulation. Die Modulation mit einer Rechteckspannung führt zur Abstrahlung multipler Radiofrequenzen. Es kommt zu EMV-Störungen, die gerade bei Steuerungen zu tückischen Fehlern führen können.
Im niedrigen PWM-Frequenzbereich (1-2kHz) kommt es zu unangenehmen Pfeifgeräuschen am Motor. Man könnte die Schaltfrequenz jetzt einfach weiter erhöhen. Dann hat der Strom aber nicht genügend Zeit, seinen maximalen Zustand in der Spule/Wicklung zu erreichen. Er oszilliert dann zwischen zwei nicht stabilen Zustandswerten, was zu einer Stromwelligkeit führt.
Eine zu hohe Stromwelligkeit erhöht die Erwärmung im Wicklungspaket, wodurch die Motorleistung abnimmt und die Lebensdauer des Motors beeinträchtigt wird.
... ganz schön viel Physik für ein kleines Bauteil.
Jetzt die gute Nachricht: Bei Motoren in der Leistungsklasse sind diese Nachteile durchaus hinnehmbar.
Freuen wir uns über die vorher beschriebenen Vorteile.

