
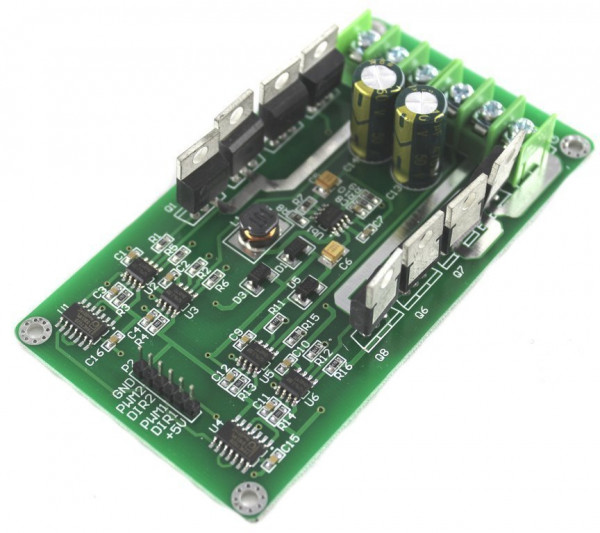

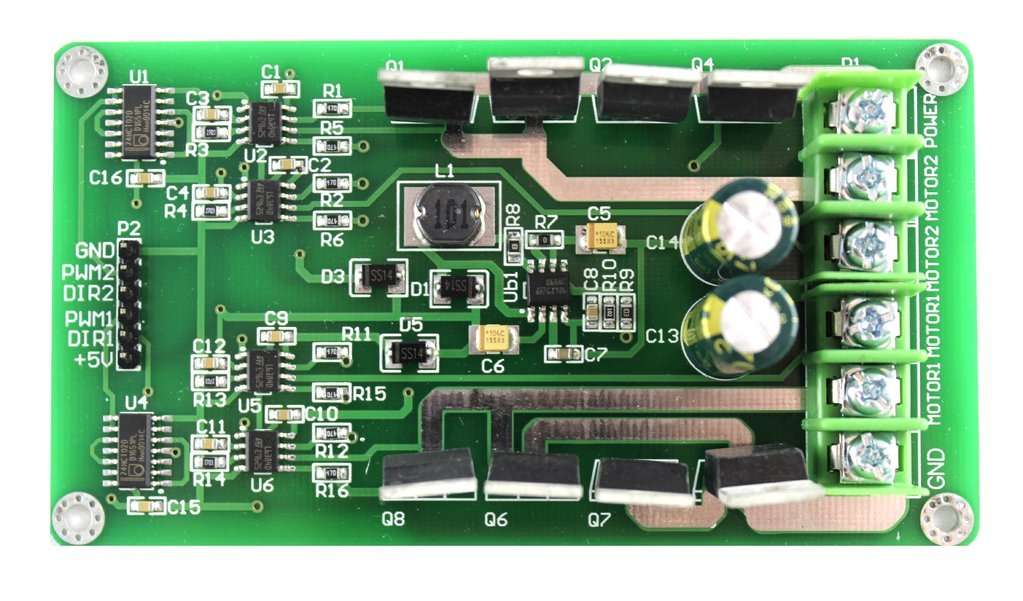



ponte H da 30A con transistor MOSFET IRF3205

21,14 € *
Contenuto:
1 Stück
Prezzi incl. IVA più spese di spedizione
15 Pezzo in magazzino
Tempi di consegna: 1-3 giorni lavorativi
Siamo conosciuti per
- Spedizione veloce dalla Germania
- 100.000+ clienti soddisfatti
- Oltre 10 anni di esperienza









- Numero d'ordine: F23108636
- Peso: 0,06 kg
- Dimensioni dell'imballaggio: 10.8 cm x 6.5 cm x 2.2 cm (L x A x A)
21,14 € *
ponte H da 30A con transistor MOSFET IRF3205
Accessori
Suggerimento!

")
")
 con 830 contatti")

")

 - 100 cm")


Contenuto
1 Stück
Da 5,99 €
*

, asta filettata")






- 20%
")
Contenuto
1 Stück
5,52 €
*
6,90 €
*

")






- 10%

Contenuto
1 Stück
Da 2,01 €
*
2,23 €
*







- 10%

Contenuto
1 Stück
4,10 €
*
4,55 €
*




