

ROBOTIS TURTLEBOT3 Waffle Pi RPi3
Prezzi incl. IVA più spese di spedizione
Tempi di consegna: 2-4 giorni lavorativi
Siamo conosciuti per
- Spedizione veloce dalla Germania
- 100.000+ clienti soddisfatti
- Oltre 10 anni di esperienza









- Numero d'ordine: F25111010
- Peso: 1,80 kg
- Dimensioni dell'imballaggio: 34 cm x 12.5 cm x 25 cm (L x A x A)
ROBOTIS TURTLEBOT3 è la piattaforma di sviluppo ufficiale di ROS.org per aziende, istituti di ricerca e università.
Il Robot Operating System (ROS) è un framework/middleware open source per lo sviluppo di sistemi autonomi. ROS ha un gran numero di utenti e per questo motivo le possibilità del framework vengono costantemente ampliate. Il Turtlebot3 Waffle è dotato di una scheda di sviluppo Raspberry Pi, un sistema ROBOTIS LiDAR a 360°, un'unità di controllo OpenCR, una fotocamera Raspberry Pi e due servomotori Dynamixel per la locomozione.
ROBOTIS OpenManipulator
Oltre a sensori aggiuntivi, il Waffle Pi di ROBOTIS può essere completato con un braccio robotico OpenManipulator, acquistabile come opzione. Come l'intero Waffle Pi, anche questo è completamente open source e ottimamente documentato, in modo che gli algoritmi per la manipolazione mobile possano essere studiati immediatamente.

Cosa rende questo robot così unico e cosa posso fare con lui?
Il ROBOTIS TURTLEBOT3 è probabilmente la piattaforma di sviluppo più conveniente nel campo dello SLAM e della navigazione al momento. Grazie ai componenti di alta qualità, è possibile generare ed elaborare dati di misura affidabili. Inoltre, la scheda di controllo OpenCR offre una serie di opzioni di espansione, ad esempio per controllare un braccio robotico o implementare sensori aggiuntivi. Le aree di applicazione predestinate del ROBOTIS Waffle sono lo SLAM e la navigazione.
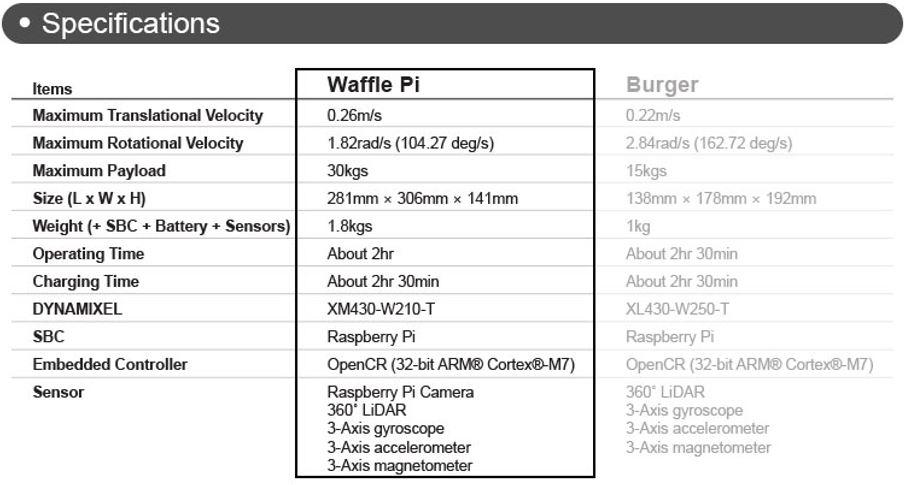
Dati tecnici
Ambito di consegna

ROBOTIS TURTLEBOT3 è la piattaforma di sviluppo ufficiale di ROS.org per aziende, istituti di ricerca e università.
Il Robot Operating System (ROS) è un framework/middleware open source per lo sviluppo di sistemi autonomi. ROS ha un gran numero di utenti e per questo motivo le possibilità del framework vengono costantemente ampliate. Il Turtlebot3 Waffle è dotato di una scheda di sviluppo Raspberry Pi, un sistema ROBOTIS LiDAR a 360°, un'unità di controllo OpenCR, una fotocamera Raspberry Pi e due servomotori Dynamixel per la locomozione.
ROBOTIS OpenManipulator
Oltre a sensori aggiuntivi, il Waffle Pi di ROBOTIS può essere completato con un braccio robotico OpenManipulator, acquistabile come opzione. Come l'intero Waffle Pi, anche questo è completamente open source e ottimamente documentato, in modo che gli algoritmi per la manipolazione mobile possano essere studiati immediatamente.
Cosa rende questo robot così unico e cosa posso fare con lui?
Il ROBOTIS TURTLEBOT3 è probabilmente la piattaforma di sviluppo più conveniente nel campo dello SLAM e della navigazione al momento. Grazie ai componenti di alta qualità, è possibile generare ed elaborare dati di misura affidabili. Inoltre, la scheda di controllo OpenCR offre una serie di opzioni di espansione, ad esempio per controllare un braccio robotico o implementare sensori aggiuntivi. Le aree di applicazione predestinate del ROBOTIS Waffle sono lo SLAM e la navigazione.
Dati tecnici
Ambito di consegna