
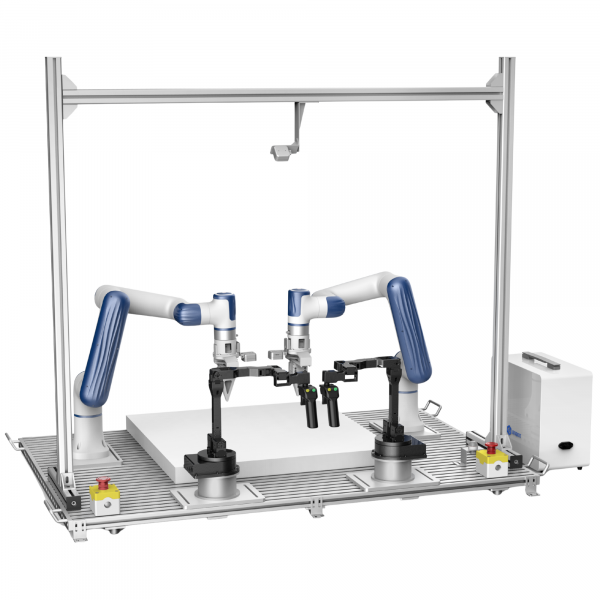








Dobot X-Trainer / Robot di teleoperazione
33.390,00 € *
Contenuto:
1 Stück
Prezzi incl. IVA più spese di spedizione
Tempi di consegna: 21 giorni lavorativi
Siamo conosciuti per
- Teleoperazione a doppio braccio per l'addestramento dell'intelligenza artificiale
- Ideale per l'apprendimento per imitazione e l'acquisizione di dati
- Con sistema di telecamere e API aperte per lo sviluppo









- Numero d'ordine: F25111125
33.390,00 € *
Dobot X-Trainer / Robot di teleoperazione
Accessori
