

 & Doppelwelle – 300 U/min")
 & Doppelwelle – 300 U/min")











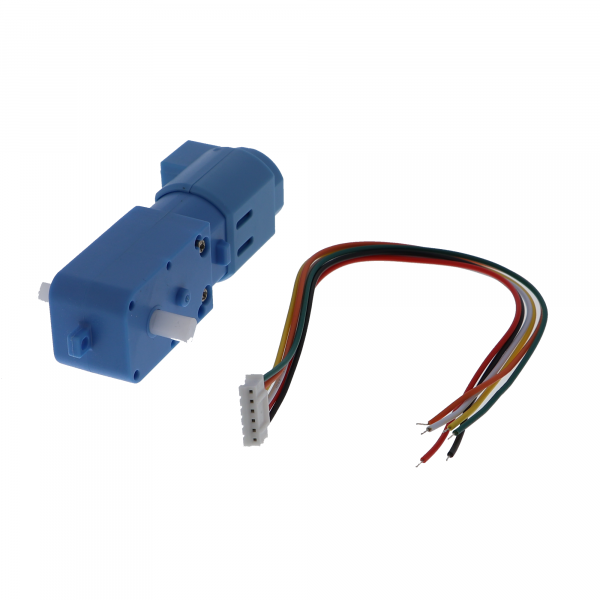
Dieser TT-DC-Getriebemotor mit Doppelwelle und integriertem Hall-Encoder (2 Kanäle) ist ideal für präzise Drehzahlmessung und Richtungs-/Weg-Erfassung in Robotik- und DIY-Projekten (z. B. Arduino / Raspberry Pi, Smart-Car, STEM). Der Encoder liefert zwei phasenversetzte Quadratwellen-Signale (H1/H2), wodurch neben der Drehzahl auch die Drehrichtung zuverlässig bestimmt werden kann.
Technische Details
Pinbelegung / Anschlüsse
Encoder (Hall):
-
G = Hall-Versorgung GND
-
V = Hall-Versorgung + (typisch 3,3 V oder 5 V, abhängig vom Mikrocontroller)
-
H1 = Hall-Ausgang Kanal 1 (Quadratwelle)
-
H2 = Hall-Ausgang Kanal 2 (Quadratwelle)
Motor:
-
M+ = Motorversorgung Plus
-
M- = Motorversorgung Minus
Wichtig:
-
Die Spannung V–G (Encoder) richtet sich nach deinem Controller (typisch 3,3 V / 5 V).
-
Die Spannung M+–M- ist die Motorspannung (je nach Variante 6 V bzw. 12 V).
-
Auf der Welle sitzt eine magnetische Scheibe (N-/S-Polbereiche).
-
Der Hall-Sensor erkennt die Pole und erzeugt daraus eine Quadratwelle: z. B. High bei S-Pol, Low bei N-Pol.
-
H1 und H2 sind an unterschiedlichen Positionen angeordnet → die Signale sind phasenverschoben (Quadratur).
Damit kann man: -
Drehzahl aus der Frequenz/Periodendauer berechnen
-
Drehrichtung über die Phasenlage H1 vs. H2 bestimmen
Drehzahlberechnung (aus Periodendauer)
Wenn die Magnetscheibe P Pole (bzw. Polsegmente) erzeugt und die gemessene Periodendauer der Hall-Quadratwelle T ist: n=60/P⋅T
-
n in U/min
-
T in Sekunden
-
P = Anzahl der magnetischen Pole/Segmente (abhängig von der verwendeten Magnetscheibe)
Abmessungen
-
Gesamtlänge: ~ 79,95 mm
-
Getriebegehäuse-Breite: ~ 22,40 mm
-
Motor-/Gehäusehöhe: ~ 25,79 mm
-
Abtriebswelle: Ø ~ 5,40 mm
Typische Anwendungen
-
Encoder-Rad / Odometrie (Wegmessung)
-
Roboterfahrwerke, Smart-Car, Line-Follower
-
Regelung von Geschwindigkeit (PID), RPM-Messung
-
Lehr-/STEM-Projekte, Prototyping
Lieferumfang
- 1x TT-Getriebemotor mit Hall-Encoder (AB) & Doppelwelle – 300 U/min, inkl. Anschlusskabel







