

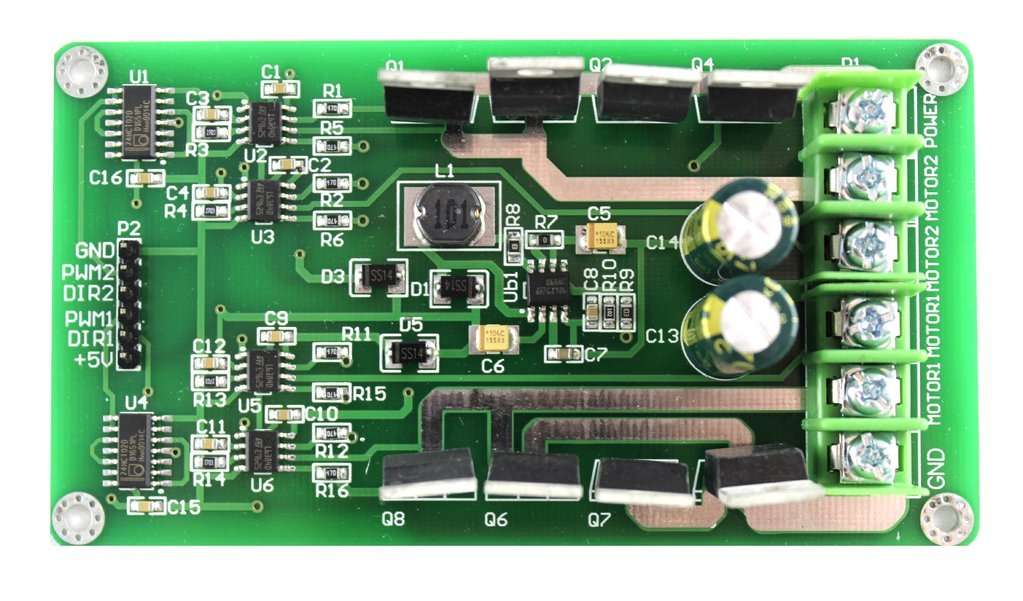



pont H 30A avec transistors IRF3205 MOSFET

21,14 € *
Contenu :
1 Stück
incl. TVA plus frais d'expédition
15 Pièce en stock
Délai de livraison: 1-3 jours ouvrables
Nous sommes connus pour
- Envoi éclair depuis l'Allemagne
- 100.000+ clients satisfaits
- Plus de 10 ans d'expérience









- Numéro d'article : F23108636
- Poids : 0,06 kg
- Dimensions de l'emballage : 10.8 cm x 6.5 cm x 2.2 cm (L x L x H)
21,14 € *
pont H 30A avec transistors IRF3205 MOSFET
Accessoires
TIP !

")
")
 avec 830 contacts")

")

 - 100cm")



Vendu
, tige filetée")
Vendu


Vendu




")

")






- 10%






Vendu


- 10%





