






MANO ROBOTIS RH-P12-RN-UR
Prezzi incl. IVA più spese di spedizione
Tempi di consegna: 21-25 giorni lavorativi
Siamo conosciuti per
- Spedizione veloce dalla Germania
- 100.000+ clienti soddisfatti
- Oltre 10 anni di esperienza









- Numero d'ordine: F25110918
- Peso: 0,50 kg
- Dimensioni dell'imballaggio: 25 cm x 15 cm x 15 cm (L x A x A)
La mano RH-P12-RN è una pinza a 2 dita del produttore sudcoreano ROBOTIS. Questa pinza è completamente compatibile con DYNAMIXEL, il che significa che il sistema bus DYNAMIXEL viene utilizzato sia per il trasferimento dei dati che per l'alimentazione. La pinza è dotata di un potente motore DC da 10W, che genera una forza di presa di 170N. La pinza RH-P12-RN si distingue anche per l'esclusivo rapporto peso/prestazioni. Con un peso di soli 0,5 kg, è possibile raggiungere un carico utile di 5 kg. Per offrire un elevato grado di flessibilità, le dita della pinza sono state progettate in modo da poterle sostituire in un attimo con altre personalizzate.
Riepilogo delle caratteristiche speciali
- Facile integrazione con la Serie UR e (URCap): UR3e, UR5e, UR10e e UR16e
- Protocollo DYNAMIXEL 2.0
- Punte di presa intercambiabili
- Sistema bus DYNAMIXEL
- forza di presa di 170N
- Carico utile fino a 5 kg
Dati tecnici
- MCU: ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit)
- Sensore di posizione: Encoder assoluto senza contatto (12bit, 360°)
- Motore: Coreless
- Velocità di trasmissione: 9.600 bps ~ 10,5 Mbps
- Algoritmo di controllo: Controllo PID
- Grado di precisione: 0,088°
- Modalità operativa: Modalità di controllo della corrente / Modalità di controllo della posizione basata sulla corrente
- Peso: 500g
- Corsa: 0 ~ 109 mm
- Rapporto di trasmissione: 1295.7 : 1
- Forza di presa massima: 170N
- Carico utile consigliato: 5 kg
- Temperatura di funzionamento: -5°C ~ 55°C
- Tensione nominale: 24 V
- Segnale di comando: Pacchetto digitale
- Tipo di protocollo: Comunicazione seriale asincrona RS485 (8bit, 1stop, nessuna parità)
- Connessione fisica: RS485 Multi Drop BUS
- ID: 0 ~ 252
- Feedback: Posizione, velocità, corrente, temperatura, tensione di ingresso, ecc.
- Materiale: ingranaggio in metallo, corpo in metallo
- Corrente in standby: 30mA
- Corrente di picco: 3,33A
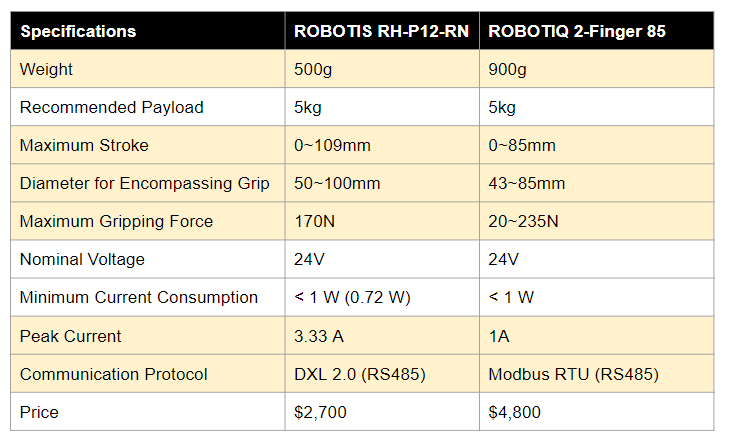
Confronto tra la pinza a 2 dita ROBOTIQ e ROBOTIS RH-P12-RN
Ambito di fornitura
- Pinza a 2 dita ROBOTIS RH-P12-RN-UR
- UR-Cap
- Cavo di alimentazione e dati per il collegamento a UR e-Series
- Varie connessioni a vite
La mano RH-P12-RN è una pinza a 2 dita del produttore sudcoreano ROBOTIS. Questa pinza è completamente compatibile con DYNAMIXEL, il che significa che il sistema bus DYNAMIXEL viene utilizzato sia per il trasferimento dei dati che per l'alimentazione. La pinza è dotata di un potente motore DC da 10W, che genera una forza di presa di 170N. La pinza RH-P12-RN si distingue anche per l'esclusivo rapporto peso/prestazioni. Con un peso di soli 0,5 kg, è possibile raggiungere un carico utile di 5 kg. Per offrire un elevato grado di flessibilità, le dita della pinza sono state progettate in modo da poterle sostituire in un attimo con altre personalizzate.
Riepilogo delle caratteristiche speciali
- Facile integrazione con la Serie UR e (URCap): UR3e, UR5e, UR10e e UR16e
- Protocollo DYNAMIXEL 2.0
- Punte di presa intercambiabili
- Sistema bus DYNAMIXEL
- forza di presa di 170N
- Carico utile fino a 5 kg
Dati tecnici
- MCU: ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit)
- Sensore di posizione: Encoder assoluto senza contatto (12bit, 360°)
- Motore: Coreless
- Velocità di trasmissione: 9.600 bps ~ 10,5 Mbps
- Algoritmo di controllo: Controllo PID
- Grado di precisione: 0,088°
- Modalità operativa: Modalità di controllo della corrente / Modalità di controllo della posizione basata sulla corrente
- Peso: 500g
- Corsa: 0 ~ 109 mm
- Rapporto di trasmissione: 1295.7 : 1
- Forza di presa massima: 170N
- Carico utile consigliato: 5 kg
- Temperatura di funzionamento: -5°C ~ 55°C
- Tensione nominale: 24 V
- Segnale di comando: Pacchetto digitale
- Tipo di protocollo: Comunicazione seriale asincrona RS485 (8bit, 1stop, nessuna parità)
- Connessione fisica: RS485 Multi Drop BUS
- ID: 0 ~ 252
- Feedback: Posizione, velocità, corrente, temperatura, tensione di ingresso, ecc.
- Materiale: ingranaggio in metallo, corpo in metallo
- Corrente in standby: 30mA
- Corrente di picco: 3,33A
Confronto tra la pinza a 2 dita ROBOTIQ e ROBOTIS RH-P12-RN
Ambito di fornitura
- Pinza a 2 dita ROBOTIS RH-P12-RN-UR
- UR-Cap
- Cavo di alimentazione e dati per il collegamento a UR e-Series
- Varie connessioni a vite