

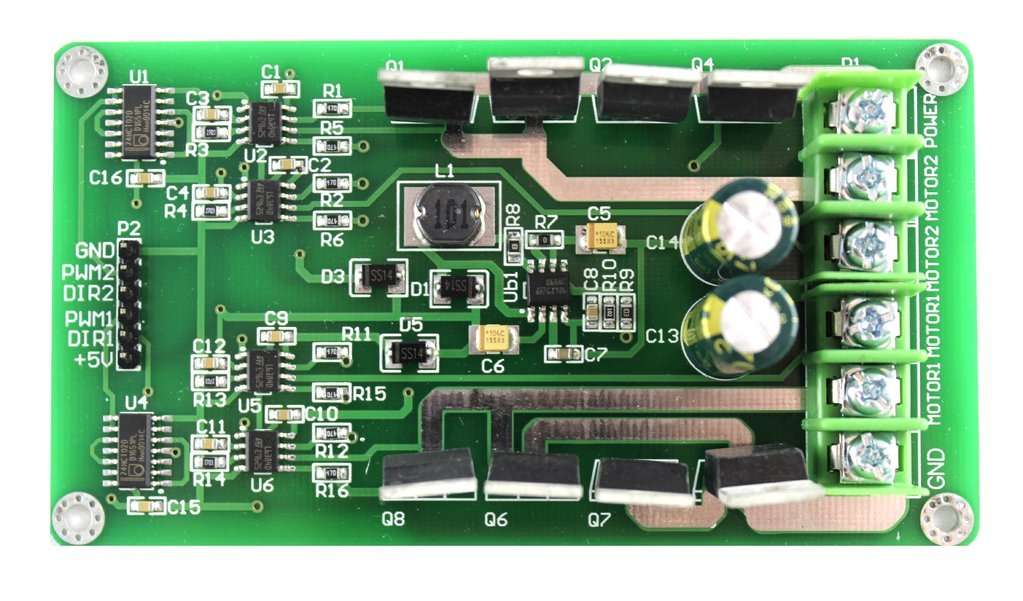



puente en H de 30 A con transistores MOSFET IRF3205

21,14 € *
Contenido:
1 Stück
incl. IVA más gastos de envío
15 Pieza en stock
Plazo de entrega: 1-3 días laborables
Somos conocidos por
- Envío rápido desde Alemania
- 100.000+ clientes satisfechos
- Más de 10 años de experiencia









- Nº de artículo F23108636
- Peso: 0,06 kg
- Dimensiones del embalaje: 10.8 cm x 6.5 cm x 2.2 cm (L x A x A)
21,14 € *
puente en H de 30 A con transistores MOSFET IRF3205
Accesorios
¡CONSEJO!

")
")
 con 830 contactos")

")

 - 100 cm")



, varilla roscada")






- 20%
")

")






- 10%








- 10%





