



")
")
")
")
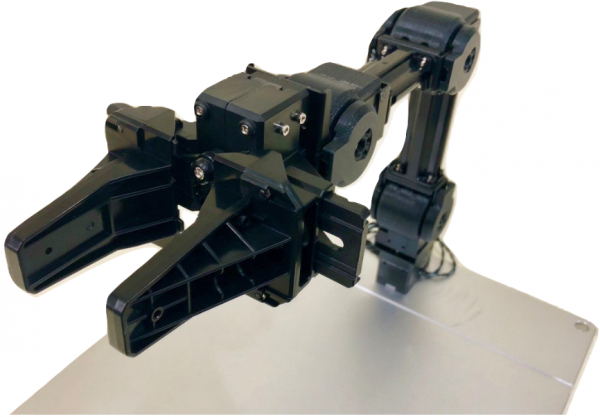
ROBOTIS OpenManipulator-X (RM-X52-TNM)
incl. TVA plus frais d'expédition
Délai de livraison: 2-4 jours ouvrables
Nous sommes connus pour
- Envoi éclair depuis l'Allemagne
- 100.000+ clients satisfaits
- Plus de 10 ans d'expérience









- Numéro d'article : F25111003
- Poids : 0,97 kg
- Dimensions de l'emballage : 28 cm x 19 cm x 6 cm (L x L x H)
Le manipulateur OpenManipulator a été développé par ROBOTIS comme module supplémentaire pour le Turtlebot3 Waffle Pi. Grâce à cela, ce bras robotisé est entièrement pris en charge par le ROS (Robot Operating System) et est donc prédestiné à la manipulation mobile.
En outre, ce bras robotisé peut bien sûr être utilisé de manière autonome, c'est pourquoi une plaque d'adaptation correspondante (Base Plate-02) peut être commandée en option.
Le OpenManipulator est basé sur les servomoteurs DYNAMIXEL de la série X en combinaison avec l'OpenCR1.0 comme unité de commande. Les servomoteurs utilisables pour cela vont de la série XL430 à la série XH430 en passant par la série XM430, qui peut fonctionner jusqu'à 24V si l'on choisit la série V. Ce bras robotisé peut donc déjà être utilisé dans de petites applications industrielles.
Si l'OpenManipulator est utilisé indépendamment du TB3 Waffle Pi, il est recommandé d'ajouter le kit ROBOTIS OpenManipulator Stand Alone. Il comprend la Base Plate-02 ainsi qu'une alimentation électrique correspondante.
Turtlebot 3 Waffle Pi
L'OpenManipulator n'a pas seulement été conçu comme un appareil autonome, il peut également être utilisé en combinaison avec Turtlebot 3 Waffle Pi. Bien entendu, le bras robotique est open source et l'intégration est entièrement documentée.

Données techniques

Liens de téléchargement et instructions
Contenu de la livraison
- ROBOTIS OpenManipulator
- Kit de câbles & accessoires
Le manipulateur OpenManipulator a été développé par ROBOTIS comme module supplémentaire pour le Turtlebot3 Waffle Pi. Grâce à cela, ce bras robotisé est entièrement pris en charge par le ROS (Robot Operating System) et est donc prédestiné à la manipulation mobile.
En outre, ce bras robotisé peut bien sûr être utilisé de manière autonome, c'est pourquoi une plaque d'adaptation correspondante (Base Plate-02) peut être commandée en option.
Le OpenManipulator est basé sur les servomoteurs DYNAMIXEL de la série X en combinaison avec l'OpenCR1.0 comme unité de commande. Les servomoteurs utilisables pour cela vont de la série XL430 à la série XH430 en passant par la série XM430, qui peut fonctionner jusqu'à 24V si l'on choisit la série V. Ce bras robotisé peut donc déjà être utilisé dans de petites applications industrielles.
Si l'OpenManipulator est utilisé indépendamment du TB3 Waffle Pi, il est recommandé d'ajouter le kit ROBOTIS OpenManipulator Stand Alone. Il comprend la Base Plate-02 ainsi qu'une alimentation électrique correspondante.
Turtlebot 3 Waffle Pi
L'OpenManipulator n'a pas seulement été conçu comme un appareil autonome, il peut également être utilisé en combinaison avec Turtlebot 3 Waffle Pi. Bien entendu, le bras robotique est open source et l'intégration est entièrement documentée.
Données techniques
Liens de téléchargement et instructions
Contenu de la livraison
- ROBOTIS OpenManipulator
- Kit de câbles & accessoires