



Kit Soft Gripper pour DOBOT MG400
1 090,00 € *
Contenu :
1 Stück
incl. TVA plus frais d'expédition
Délai de livraison: 1-3 jours ouvrables
Nous sommes connus pour
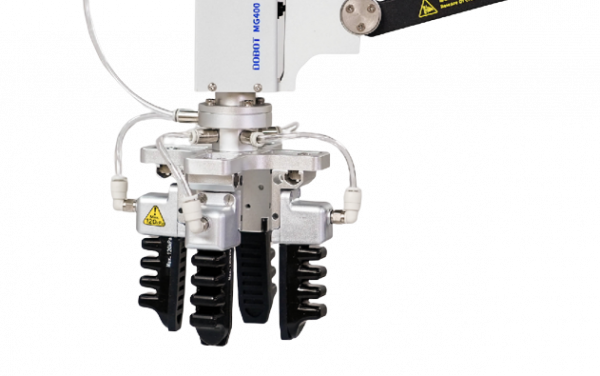
- Kit Soft Gripper pour les pièces délicates et irrégulières
- Pour DOBOT MG400 avec pince à 2, 3 ou 4 doigts
- Solution plug-and-play avec connexion de 4 mm et jusqu'à 300 cycles/min









- Numéro d'article : F23107330
- Poids : 0,50 kg
1 090,00 € *
Kit Soft Gripper pour DOBOT MG400
Accessoires
- 16%


")

- 27%

- 18%

- 16%

- 25%
