

 & double arbre - 300 tr/min")
 & double arbre - 300 tr/min")
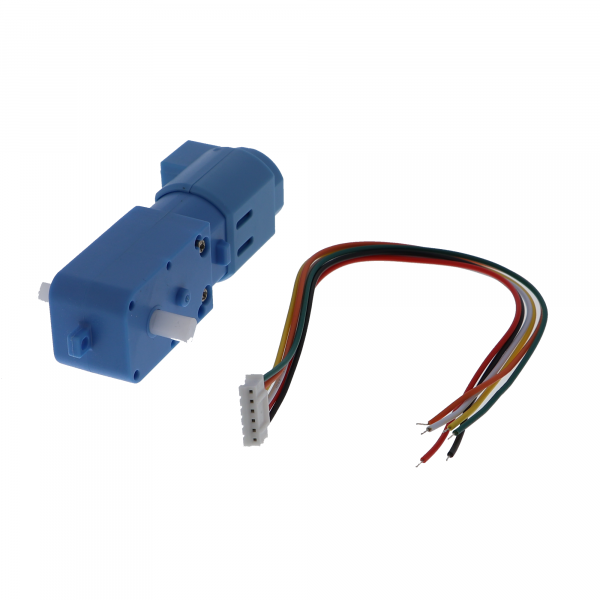
Motoréducteur TT avec encodeur à effet Hall (AB) & double arbre - 300 tr/min

8,74 € *
Contenu :
1 Stück
incl. TVA plus frais d'expédition
38 Pièce en stock
1-3 jours ouvrables
Nous sommes connus pour
- Envoi éclair depuis l'Allemagne
- 100.000+ clients satisfaits
- Plus de 10 ans d'expérience









- Numéro d'article : F23105692
- Poids : 0,04 kg
- Dimensions de l'emballage : 8 cm x 2.2 cm x 2.5 cm (L x L x H)
8,74 € *
Motoréducteur TT avec encodeur à effet Hall (AB) & double arbre - 300 tr/min

- 2%

")
")
Vendu
- 6%
