

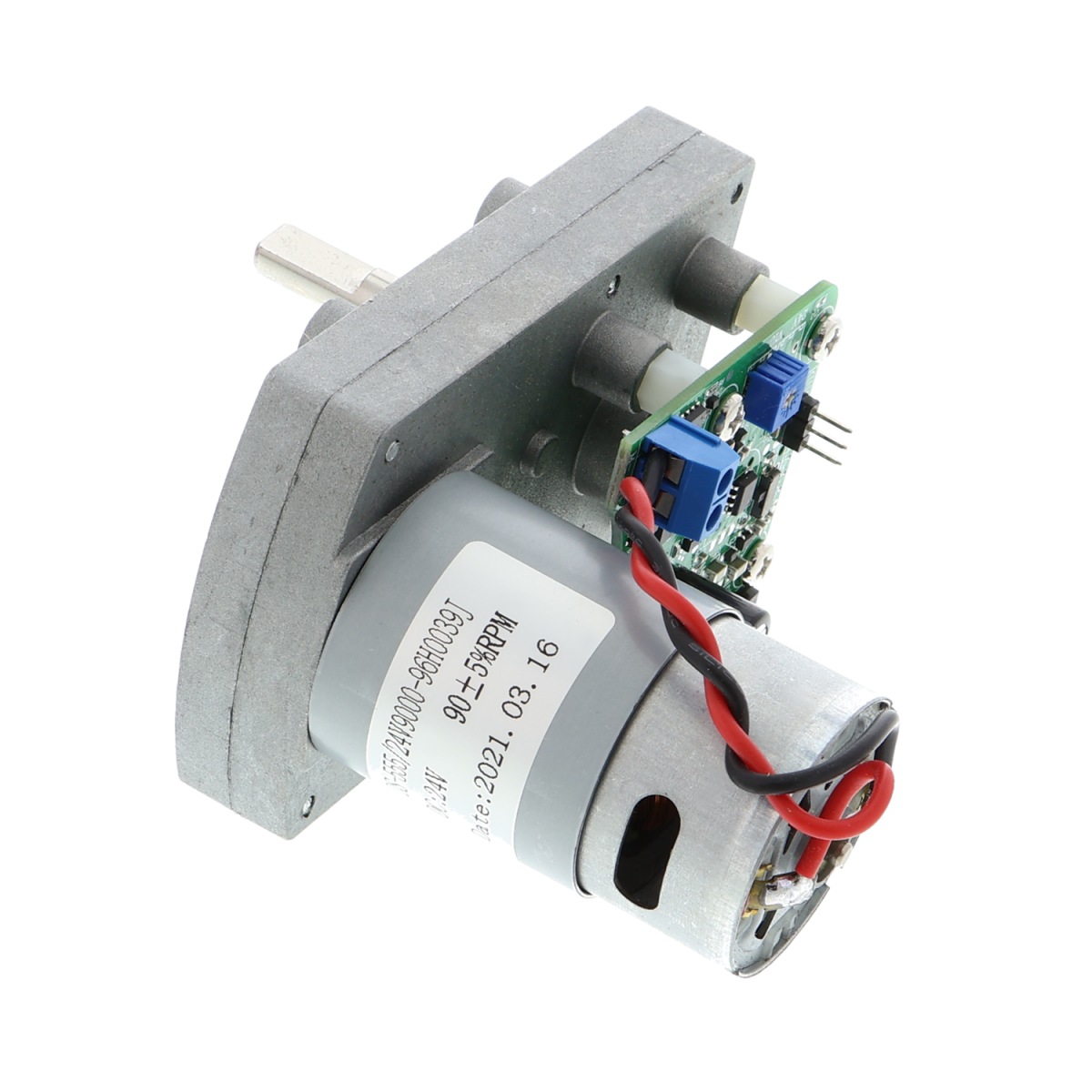




Servomotor extremadamente potente 12-24V - ángulo o rotación

39,90 € *
64,37 € *
(38,01% guardado)
incl. IVA más gastos de envío
Todavía 1 ¡en stock!
Listo para envío inmediato
Plazo de entrega: 1-3 días laborables
Somos conocidos por
- Envío rápido desde Alemania
- 100.000+ clientes satisfechos
- Más de 10 años de experiencia









- Nº de artículo F23106649
- Peso: 0,76 kg
- Dimensiones del embalaje: 13 cm x 7 cm x 11 cm (L x A x A)
39,90 € *
Servomotor extremadamente potente 12-24V - ángulo o rotación

- 16%


- 57%



Agotado
")





Agotado

 - varios colores")

- 34%




- 16%

Todavía 1 ¡en stock!
- 31%

- 6%

")
- 15%






¡CONSEJO!


Agotado
 - Luz de discoteca - Sistema de iluminación controlado por sonido")
Todavía 1 ¡en stock!


- 45%



")
- 52%

