








Dobot X-Trainer / Robot de téléopération
33 390,00 € *
Contenu :
1 Stück
incl. TVA plus frais d'expédition
Délai de livraison: 21 jours ouvrables
Nous sommes connus pour
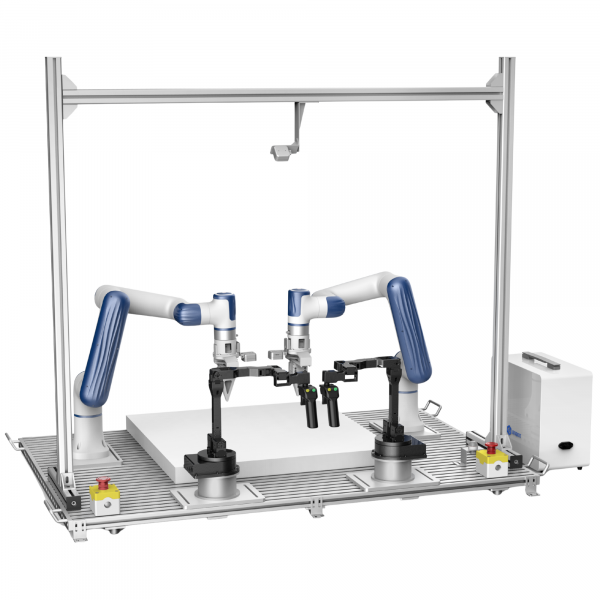
- Téléopération à double bras pour l'entraînement AI
- Idéal pour l'apprentissage par imitation et la collecte de données
- Avec un système de caméras et des API ouvertes pour le développement









- Numéro d'article : F25111125
33 390,00 € *
Dobot X-Trainer / Robot de téléopération
Accessoires
