

Origine des régulateurs de vitesse PWM
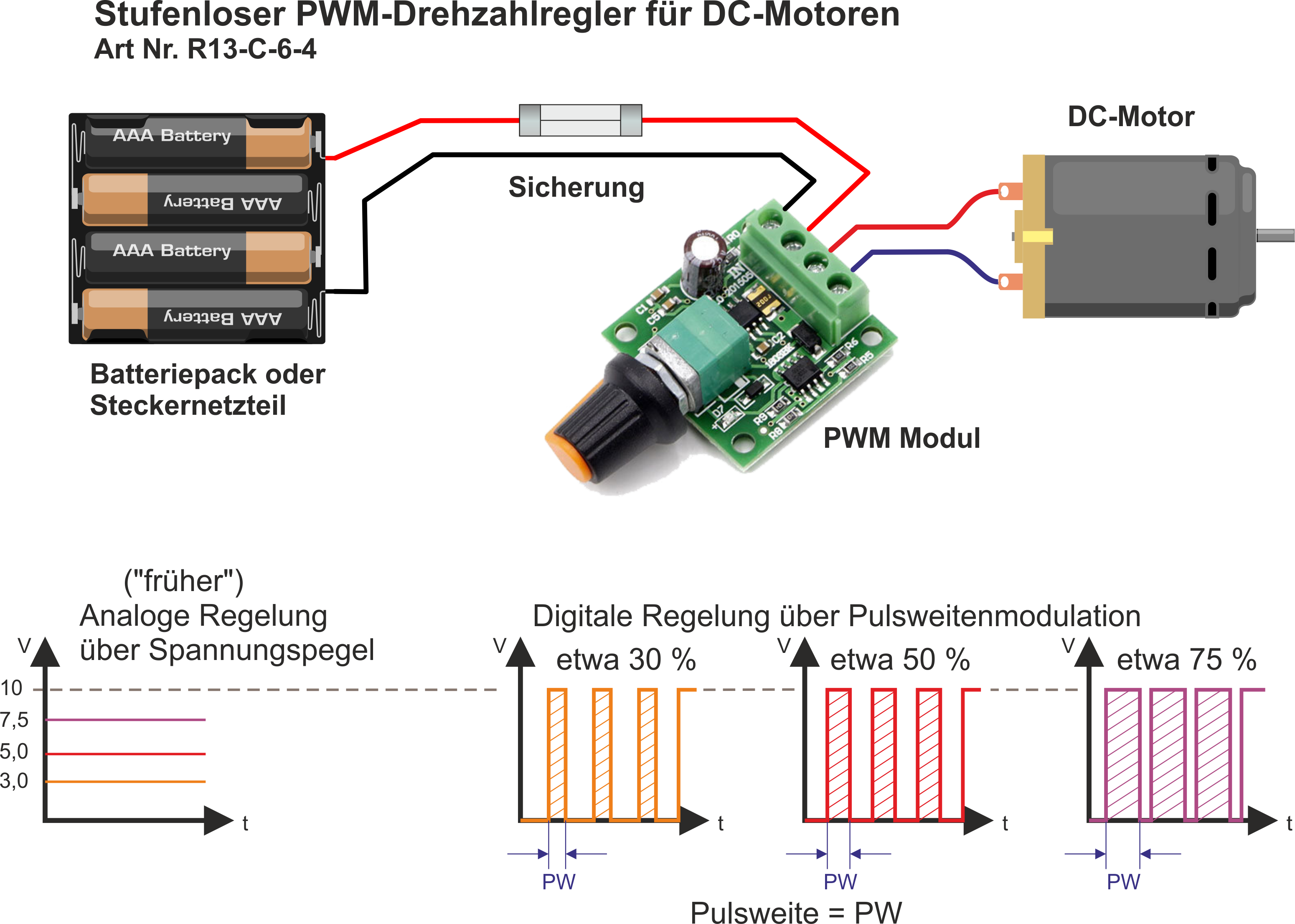
Avant le développement de l'électronique de puissance, la régulation de la vitesse des moteurs à courant continu (à balais) était résolue avec des régulateurs linéaires ou des résistances . De manière imagée, on a réduit la tension (et donc aussi le courant) pour modifier la vitesse de rotation.
Mais cela présente quelques inconvénients, qui se manifestent surtout en fonctionnement sur batterie . La tension et le courant sont transformés en énergie thermique (inutilisée) ("brûlés") au niveau de l'unité de régulation (ou la résistance).
La consommation totale reste très élevée, tandis que la puissance utilisable diminue. Comme le couple dépend du flux de courant, celui-ci s'effondre également.
Comment fonctionnent les régulateurs de vitesse PWM ?
Avec le développement de l'électronique de puissance, une idée différente a été adoptée pour résoudre le problème. En activant et désactivant (très) rapidement la tension d'alimentation , on "pulse" la tension (et donc le courant). L'interrupteur (électronique) ne perd pas de puissance pendant la période "OFF". Ainsi, il n'y a (presque) plus de pertes au niveau de la régulation.
Pendant la période de "marche", la tension du moteur est PLEINE. Par conséquent, le courant - et donc le couple - est élevé en conséquence. Malheureusement, un moteur avec ses bobines et son noyau de fer n'est pas un consommateur ohmique idéal, c'est pourquoi cette affirmation n'est pas totalement correcte du point de vue physique .
Cependant, la combinaison de l'inductance de la bobine et de l'inertie du moteur aide à lisser la vitesse de rotation, de sorte que le moteur se comporte comme , comme si il fonctionnait avec une tension continue continue.
Cela nous amène aux inconvénients de la modulation de largeur d'impulsion. La modulation avec une tension carrée entraîne l'émission de multiples fréquences radio. Il en résulte des perturbations CEM qui peuvent conduire à des erreurs perfides, en particulier sur les commandes .
Dans la plage de fréquences PWM basses (1-2kHz), le moteur émet des sifflements désagréables On pourrait maintenant simplement continuer à augmenter la fréquence de commutation. Mais alors, le courant n'a pas assez de temps pour atteindre son état maximal dans la bobine/l'enroulement. Il oscille alors entre deux valeurs d'état non stables, ce qui entraîne une ondulation du courant.
Une ondulation de courant trop élevée augmente l'échauffement dans le paquet d'enroulement, ce qui diminue la puissance du moteur et affecte la durée de vie du moteur .
... c'est beaucoup de physique pour un petit composant.
Maintenant, la bonne nouvelle : Pour les moteurs de cette classe de puissance, ces inconvénients sont tout à fait acceptables .
Réjouissons-nous des avantages décrits précédemment.

