








Dobot X-Trainer / Robot de teleoperación
33.390,00 € *
Contenido:
1 Stück
incl. IVA más gastos de envío
Plazo de entrega: 21 días laborables
Somos conocidos por
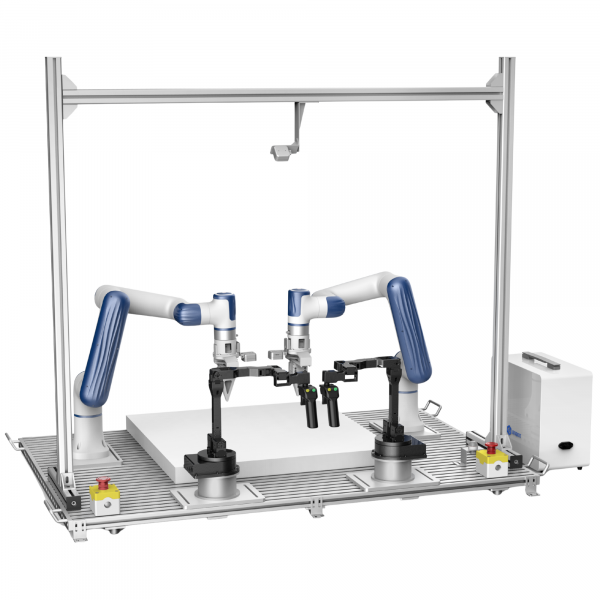
- Teleoperación de doble brazo para entrenamiento de IA
- Ideal para el aprendizaje por imitación y la adquisición de datos
- Con sistema de cámaras y API abiertas para el desarrollo









- Nº de artículo F25111125
33.390,00 € *
Dobot X-Trainer / Robot de teleoperación
Accesorios
