

Origen de los reguladores de velocidad PWM
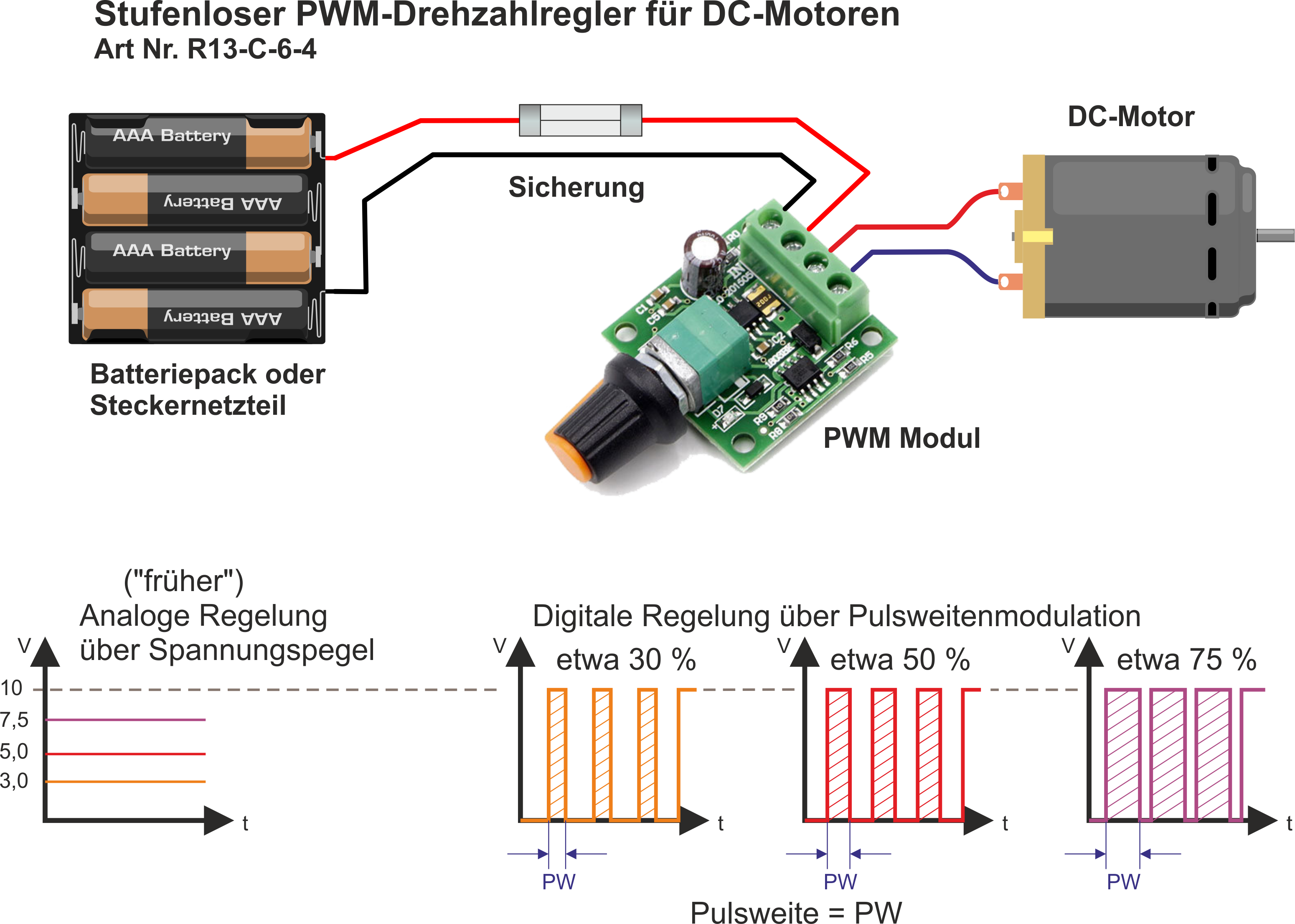
Antes del desarrollo de la electrónica de potencia, el control de velocidad de los motores de CC (con escobillas) se resolvía con reguladores lineales o resistencias en serie . En sentido figurado, se reducía la tensión (y por tanto también la corriente) para modificar la velocidad.
Sin embargo, esto tiene algunas desventajas, que se hacen evidentes especialmente en el funcionamiento con batería . La tensión y la corriente se convierten en energía térmica (no utilizada) ("quemada") en la unidad de control (o la resistencia).
El consumo total sigue siendo muy alto, mientras que la potencia utilizable se reduce. Como el par depende del flujo de corriente, esto también se colapsa.
Cómo funcionan los reguladores de velocidad PWM
Con el (ulterior) desarrollo de la electrónica de potencia, el problema se ha abordado con una idea diferente. Al conectar y desconectar (muy) rápidamente la tensión de alimentación , la tensión (y por tanto la corriente) se "pulsa". No se pierde potencia en el interruptor (electrónico) durante el tiempo de "desconexión". Esto significa que (casi) no hay pérdidas en el regulador.
Durante el tiempo de "ENCENDIDO", se aplica la tensión COMPLETA al motor. Como resultado, la corriente -y por tanto el par- es correspondientemente alta. Por desgracia, un motor con sus bobinas y núcleo de hierro no es un consumidor óhmico ideal, por lo que esta afirmación no es completamente correcta desde un punto de vista físico.
Sin embargo, la combinación de la inductancia de la bobina y la inercia del motor ayuda a suavizar la velocidad, de modo que el motor se comporta como si funcionara con una tensión continua de CC.
Esto nos lleva a las desventajas de la modulación por ancho de pulsos. La modulación con una tensión de onda cuadrada provoca la emisión de múltiples radiofrecuencias. Esto da lugar a interferencias EMC, que pueden provocar errores traicioneros, especialmente con los controladores .
En la gama baja de frecuencias PWM (1-2kHz), se producen en el motor desagradables silbidos. Ahora se podría simplemente aumentar más la frecuencia de conmutación. Sin embargo, entonces la corriente no tiene tiempo suficiente para alcanzar su estado máximo en la bobina/bobinado. Oscila entonces entre dos valores de estado no estables, lo que provoca una ondulación de la corriente.
Una ondulación excesiva de la corriente aumenta el calentamiento en el paquete de bobinado, lo que disminuye el rendimiento del motor y afecta a su vida útil .
... mucha física para un componente pequeño.
Ahora las buenas noticias: Para motores de esta clase de potencia, estas desventajas son bastante aceptables .
Alegrémonos de las ventajas descritas anteriormente.

