






Unitree G1 - Robot humanoide
incl. IVA más gastos de envío
Plazo de entrega: 14 días laborables
Somos conocidos por
- Envío rápido desde Alemania
- 100.000+ clientes satisfechos
- Más de 10 años de experiencia









- Nº de artículo F23110376
- Peso: 50,00 kg




Robot humanoide Unitree G1
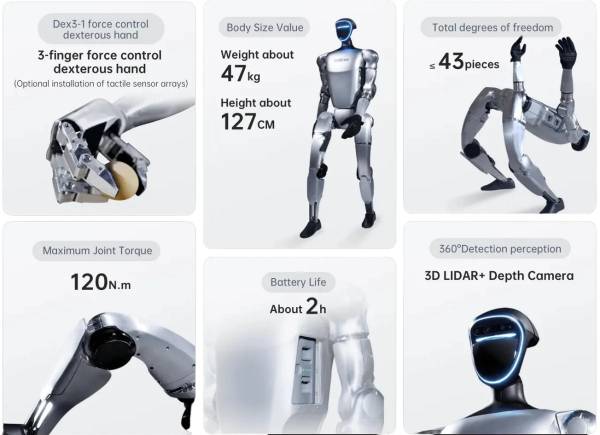
El Unitree G1 es un robot humanoide de última generación que impresiona por su notable libertad de movimiento y su avanzada tecnología. Con un grado excepcionalmente alto de movilidad articular y -dependiendo de la versión- hasta 43 grados de libertad motorizados, supera significativamente la movilidad de un humano medio.
Mediante el uso del aprendizaje por imitación y el aprendizaje por refuerzo, el robot desarrolla continuamente sus capacidades y mejora así constantemente su rendimiento en el campo de la inteligencia artificial.
Un aspecto especialmente destacado es la capacidad del G1 para levantarse de forma autónoma desde el suelo hasta una posición de pie. Se levanta sin ayuda externa y vuelve a estar inmediatamente listo para su uso.
Atención:esta función no está disponible si el robot está equipado con manos.
La versión básica del Unitree G1 sirve principalmente como impresionante modelo de demostración y exhibición, y es ideal para presentar en directo las impresionantes prestaciones de movimiento, estabilidad y dinámica del robot, sin ningún esfuerzo de programación.
Sin embargo, si realmente quieres adentrarte en las profundidades de la investigación robótica, deberías optar por las versiones EDU:
Sólo estas versiones son totalmente programables y ofrecen una plataforma de desarrollo abierta para el control de alto y bajo nivel. Esto permite secuencias de movimiento personalizadas, algoritmos de control personalizados y funciones complejas de IA.
Todos los modelos EDU llevan integrada una unidad de cálculo NVIDIA Orin NX de 16 GB, que proporciona enormes reservas de rendimiento para la IA en tiempo real, los algoritmos de percepción y el aprendizaje automático.
- G1 Básico
- Dimensiones compactas: 1270 × 450 × 200 mm (en posición vertical), 690 × 450 × 300 mm (plegada)
- Peso: aprox. 35 kg
- Grados de libertad: 23 en total
- Pierna: 6 DOF, brazo: 5 DOF, cintura: 1 DOF
- Par máximo de la rodilla: 90 Nm, carga útil del brazo: 2 kg
- Amplio rango de movimiento de las articulaciones (por ejemplo, cadera P±154°, rodilla 0-165°, cintura eje Z ±155°)
- Fuente de alimentación: 13 cadenas de baterías, aprox. 2 h de autonomía
- Potencia de cálculo básica: CPU de 8 núcleos
- Sensores: Cámara de profundidad + LiDAR 3D
- Conectividad: WiFi 6, Bluetooth 5.2
- Programación no posible
- EDU-U1 (versión estándar)
- Basado en todas las funciones del G1 Básico
- Dock integrado con potencia de cálculo NVIDIA Orin NX de 16 GB (100 TOPS)
- Programable, posibilidad de desarrollo secundario, incl. algoritmos de IA y soporte técnico
- Torsión máxima de la rodilla: 120 Nm, carga útil del brazo: 3 kg
- Grados de libertad: 23
- EDU-U2 (Versión avanzada)
- Basado en la versión estándar EDU-U1
- Cintura: 3 DOF, brazo: 7 DOF por brazo
- Grados de libertad: 29
- EDU-U3
- Basado en la versión avanzada EDU-U2
- Dos manos Dex3-1 de tres dedos controladas por fuerza (sin sensores táctiles)
- Grados de libertad: 43
- EDU-U4
- Basado en EDU-U2 Versión Avanzada
- Dos manos Dex3-1 de tres dedos controladas por fuerza (con sensores táctiles)
- Grados de libertad: 43
- EDU-U5
- Basado en la versión avanzada EDU-U2
- Dos modelos de mano de destreza de cinco dedos (RH56DFQ-2R, RH56DFQ-2L)
- Grados de libertad: 41
- EDU-U6
- Basado en EDU-U2 Versión Avanzada
- Dos modelos de mano con destreza de cinco dedos (RH56DFTP-2R, RH56DFTP-2L)
- Grados de libertad: 41
- Sensores táctiles: 17 sensores por mano
- EDU-U7
- Basado en la versión avanzada EDU-U2
- Dos potentes manos Revo 2 Basic de cinco dedos
- Grados de libertad: 41
- EDU-U8
- Basado en EDU-U1 Versión Estándar
- Dos potentes manos de tres dedos Dex3-1 (sin sensores táctiles)
- Grados de libertad: 37
- EDU-U9
- Basado en la versión estándar EDU-U1
- Dos manos Dex3-1 de tres dedos controladas por fuerza con sensores táctiles (33 sensores por mano)
- Grados de libertad: 37
- EDU-U10
- Basado en la versión estándar EDU-U1
- Dos potentes manos Revo 2 Basic de cinco dedos
- Grados de libertad: 35



| Especificación | Base G1 | G1 Versión Estándar | G1 Versión Avanzada |
|---|---|---|---|
| Dimensiones (vertical) | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm |
| Dimensiones (plegada) | 690 × 450 × 300 mm | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Peso (con batería) | aprox. 35 kg | 35 kg+ aprox | aprox. 35 kg+ |
| Grados de libertad totales | 23 | 23-43 (opcional) | 23-43 (extendido) |
| DOF cintura | 1 | 1 + opcional 2 DOF | 3 |
| DOF por brazo | 5 | 5 | 7 |
| Mano | - | Manos opcional | Manos opcionales |
| Máx. Par de la rodilla | 90 Nm | 120 Nm | 120 Nm |
| Carga del brazo | aprox. 2 kg | aprox. 3 kg | aprox. 3 kg |
| Módulo informático | cPU de 8 núcleos | Jetson Orin NX 16 GB | Jetson Orin NX 16 GB |
| Sistema de sensores | Cámara de profundidad + LiDAR 3D | Cámara de profundidad + LiDAR 3D | Cámara de profundidad + LiDAR 3D |
| Programación | No (sólo mando a distancia) | Sí | Sí - ampliada |
| Tiempo de funcionamiento | aprox. 2 h | aprox. 2 h | aprox. 2 h |
| OTA | Sí | Sí | Sí |
Peso del envío: 50,00 kg
Peso del artículo: 35,00 kg
Robot humanoide Unitree G1
El Unitree G1 es un robot humanoide de última generación que impresiona por su notable libertad de movimiento y su avanzada tecnología. Con un grado excepcionalmente alto de movilidad articular y -dependiendo de la versión- hasta 43 grados de libertad motorizados, supera significativamente la movilidad de un humano medio.
Mediante el uso del aprendizaje por imitación y el aprendizaje por refuerzo, el robot desarrolla continuamente sus capacidades y mejora así constantemente su rendimiento en el campo de la inteligencia artificial.
Un aspecto especialmente destacado es la capacidad del G1 para levantarse de forma autónoma desde el suelo hasta una posición de pie. Se levanta sin ayuda externa y vuelve a estar inmediatamente listo para su uso.
Atención:esta función no está disponible si el robot está equipado con manos.
La versión básica del Unitree G1 sirve principalmente como impresionante modelo de demostración y exhibición, y es ideal para presentar en directo las impresionantes prestaciones de movimiento, estabilidad y dinámica del robot, sin ningún esfuerzo de programación.
Sin embargo, si realmente quieres adentrarte en las profundidades de la investigación robótica, deberías optar por las versiones EDU:
Sólo estas versiones son totalmente programables y ofrecen una plataforma de desarrollo abierta para el control de alto y bajo nivel. Esto permite secuencias de movimiento personalizadas, algoritmos de control personalizados y funciones complejas de IA.
Todos los modelos EDU llevan integrada una unidad de cálculo NVIDIA Orin NX de 16 GB, que proporciona enormes reservas de rendimiento para la IA en tiempo real, los algoritmos de percepción y el aprendizaje automático.
- G1 Básico
- Dimensiones compactas: 1270 × 450 × 200 mm (en posición vertical), 690 × 450 × 300 mm (plegada)
- Peso: aprox. 35 kg
- Grados de libertad: 23 en total
- Pierna: 6 DOF, brazo: 5 DOF, cintura: 1 DOF
- Par máximo de la rodilla: 90 Nm, carga útil del brazo: 2 kg
- Amplio rango de movimiento de las articulaciones (por ejemplo, cadera P±154°, rodilla 0-165°, cintura eje Z ±155°)
- Fuente de alimentación: 13 cadenas de baterías, aprox. 2 h de autonomía
- Potencia de cálculo básica: CPU de 8 núcleos
- Sensores: Cámara de profundidad + LiDAR 3D
- Conectividad: WiFi 6, Bluetooth 5.2
- Programación no posible
- EDU-U1 (versión estándar)
- Basado en todas las funciones del G1 Básico
- Dock integrado con potencia de cálculo NVIDIA Orin NX de 16 GB (100 TOPS)
- Programable, posibilidad de desarrollo secundario, incl. algoritmos de IA y soporte técnico
- Torsión máxima de la rodilla: 120 Nm, carga útil del brazo: 3 kg
- Grados de libertad: 23
- EDU-U2 (Versión avanzada)
- Basado en la versión estándar EDU-U1
- Cintura: 3 DOF, brazo: 7 DOF por brazo
- Grados de libertad: 29
- EDU-U3
- Basado en la versión avanzada EDU-U2
- Dos manos Dex3-1 de tres dedos controladas por fuerza (sin sensores táctiles)
- Grados de libertad: 43
- EDU-U4
- Basado en EDU-U2 Versión Avanzada
- Dos manos Dex3-1 de tres dedos controladas por fuerza (con sensores táctiles)
- Grados de libertad: 43
- EDU-U5
- Basado en la versión avanzada EDU-U2
- Dos modelos de mano de destreza de cinco dedos (RH56DFQ-2R, RH56DFQ-2L)
- Grados de libertad: 41
- EDU-U6
- Basado en EDU-U2 Versión Avanzada
- Dos modelos de mano con destreza de cinco dedos (RH56DFTP-2R, RH56DFTP-2L)
- Grados de libertad: 41
- Sensores táctiles: 17 sensores por mano
- EDU-U7
- Basado en la versión avanzada EDU-U2
- Dos potentes manos Revo 2 Basic de cinco dedos
- Grados de libertad: 41
- EDU-U8
- Basado en EDU-U1 Versión Estándar
- Dos potentes manos de tres dedos Dex3-1 (sin sensores táctiles)
- Grados de libertad: 37
- EDU-U9
- Basado en la versión estándar EDU-U1
- Dos manos Dex3-1 de tres dedos controladas por fuerza con sensores táctiles (33 sensores por mano)
- Grados de libertad: 37
- EDU-U10
- Basado en la versión estándar EDU-U1
- Dos potentes manos Revo 2 Basic de cinco dedos
- Grados de libertad: 35
| Especificación | Base G1 | G1 Versión Estándar | G1 Versión Avanzada |
|---|---|---|---|
| Dimensiones (vertical) | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm | 1270 × 450 × 200 mm |
| Dimensiones (plegada) | 690 × 450 × 300 mm | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Peso (con batería) | aprox. 35 kg | 35 kg+ aprox | aprox. 35 kg+ |
| Grados de libertad totales | 23 | 23-43 (opcional) | 23-43 (extendido) |
| DOF cintura | 1 | 1 + opcional 2 DOF | 3 |
| DOF por brazo | 5 | 5 | 7 |
| Mano | - | Manos opcional | Manos opcionales |
| Máx. Par de la rodilla | 90 Nm | 120 Nm | 120 Nm |
| Carga del brazo | aprox. 2 kg | aprox. 3 kg | aprox. 3 kg |
| Módulo informático | cPU de 8 núcleos | Jetson Orin NX 16 GB | Jetson Orin NX 16 GB |
| Sistema de sensores | Cámara de profundidad + LiDAR 3D | Cámara de profundidad + LiDAR 3D | Cámara de profundidad + LiDAR 3D |
| Programación | No (sólo mando a distancia) | Sí | Sí - ampliada |
| Tiempo de funcionamiento | aprox. 2 h | aprox. 2 h | aprox. 2 h |
| OTA | Sí | Sí | Sí |
Peso del envío: 50,00 kg
Peso del artículo: 35,00 kg






 - varios colores")



