

ROBOTIS TURTLEBOT3 Hamburguesa (sin LiDAR)
incl. IVA más gastos de envío
Plazo de entrega: 2-4 días laborables
Somos conocidos por
- Envío rápido desde Alemania
- 100.000+ clientes satisfechos
- Más de 10 años de experiencia









- Nº de artículo F25111017
- Peso: 1,00 kg
- Dimensiones del embalaje: 12.5 cm x 34 cm x 25 cm (L x A x A)
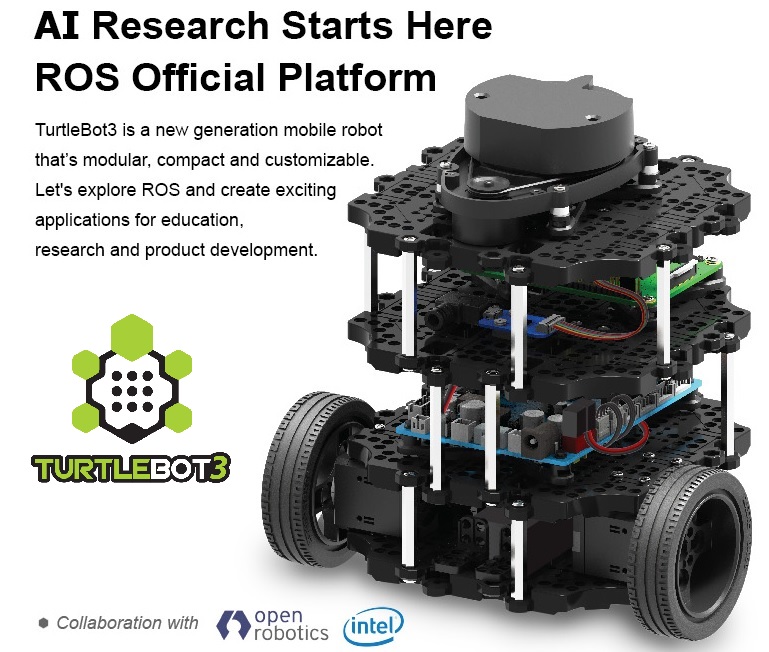
ROBOTIS TURTLEBOT3 es la plataforma de desarrollo oficial de ROS.org para empresas, instituciones de investigación y universidades.
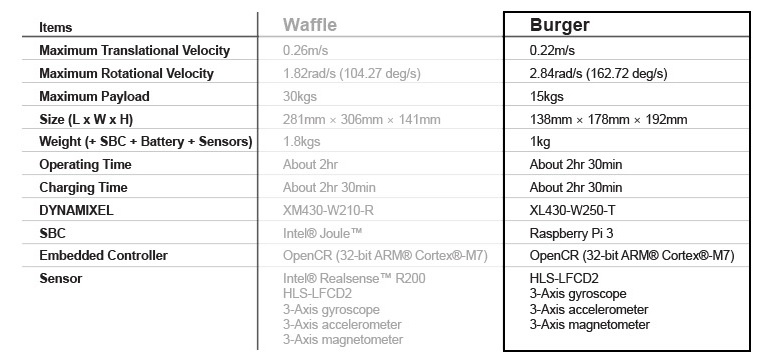
El Sistema Operativo para Robots (ROS) es un framework/middleware de código abierto para el desarrollo de sistemas autónomos. ROS cuenta con un gran número de usuarios, por lo que las posibilidades del marco se amplían constantemente. El Turtlebot3 Burger está equipado con una Raspberry Pi 3, un sistema LiDAR 360° ROBOTIS, una unidad de control OpenCR y dos servomotores Dynamixel para la locomoción.
¿Qué hace que este robot sea tan único y qué puedo hacer con él?
El TURTLEBOT3 ROBOTIS es probablemente actualmente la plataforma de desarrollo más asequible en el campo del SLAM y la navegación. Gracias a sus componentes de alta calidad, se pueden generar y procesar datos de medición fiables. Además, la placa controladora OpenCR ofrece diversas opciones de ampliación, por ejemplo para controlar un brazo robótico o implementar sensores adicionales. Los ámbitos de aplicación predestinados para la ROBOTIS Burger son el SLAM y la navegación.
Datos técnicos
Volumen de suministro
- Kit ROBOTIS TURTLEBOT3 (SIN LIDAR)
ROBOTIS TURTLEBOT3 es la plataforma de desarrollo oficial de ROS.org para empresas, instituciones de investigación y universidades.
El Sistema Operativo para Robots (ROS) es un framework/middleware de código abierto para el desarrollo de sistemas autónomos. ROS cuenta con un gran número de usuarios, por lo que las posibilidades del marco se amplían constantemente. El Turtlebot3 Burger está equipado con una Raspberry Pi 3, un sistema LiDAR 360° ROBOTIS, una unidad de control OpenCR y dos servomotores Dynamixel para la locomoción.
¿Qué hace que este robot sea tan único y qué puedo hacer con él?
El TURTLEBOT3 ROBOTIS es probablemente actualmente la plataforma de desarrollo más asequible en el campo del SLAM y la navegación. Gracias a sus componentes de alta calidad, se pueden generar y procesar datos de medición fiables. Además, la placa controladora OpenCR ofrece diversas opciones de ampliación, por ejemplo para controlar un brazo robótico o implementar sensores adicionales. Los ámbitos de aplicación predestinados para la ROBOTIS Burger son el SLAM y la navegación.
Datos técnicos
Volumen de suministro
- Kit ROBOTIS TURTLEBOT3 (SIN LIDAR)