



")
")
")
")
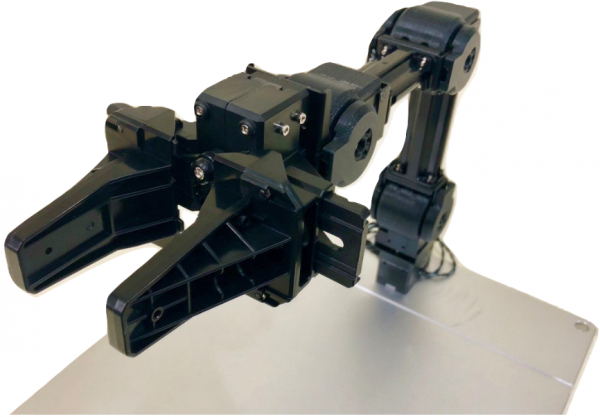
ROBOTIS OpenManipulator-X (RM-X52-TNM)
incl. IVA más gastos de envío
Plazo de entrega: 11-13 días laborables
Somos conocidos por
- Envío rápido desde Alemania
- 100.000+ clientes satisfechos
- Más de 10 años de experiencia









- Nº de artículo F25111003
- Peso: 0,97 kg
- Dimensiones del embalaje: 28 cm x 19 cm x 6 cm (L x A x A)
El OpenManipulator fue desarrollado por ROBOTIS como módulo adicional para el Turtlebot3 Waffle Pi. Como resultado, este brazo robótico es totalmente compatible con el ROS (Sistema Operativo de Robots) y, por tanto, está predestinado a la manipulación móvil.
Además, este brazo robótico también se puede utilizar, por supuesto, de forma independiente, por lo que se puede pedir como opción la placa adaptadora correspondiente (Placa base-02).
El OpenManipulator se basa en servomotores DYNAMIXEL de la serie X en combinación con el OpenCR1.0 como unidad de control. Los servomotores que se pueden utilizar van desde la serie XL430 hasta la XM430 y la XH430, que pueden funcionar con hasta 24 V si se selecciona la serie V. Esto significa que este brazo robótico ya puede utilizarse en pequeñas aplicaciones industriales.
Cuando utilices el OpenManipulator independientemente del TB3 Waffle Pi, se recomienda añadir el denominado Kit autónomo ROBOTIS OpenManipulator. Incluye la Placa Base-02 y la fuente de alimentación correspondiente.
Turtlebot 3 Waffle Pi
El OpenManipulator no sólo se ha desarrollado como dispositivo independiente, sino que también puede funcionar en combinación con el Turtlebot 3 Waffle Pi. Por supuesto, el brazo robótico es de código abierto y la integración está totalmente documentada.

Datos técnicos

Enlaces de descarga e instrucciones
Volumen de suministro
- OpenManipulador ROBOTIS
- Juego de cables y accesorios
El OpenManipulator fue desarrollado por ROBOTIS como módulo adicional para el Turtlebot3 Waffle Pi. Como resultado, este brazo robótico es totalmente compatible con el ROS (Sistema Operativo de Robots) y, por tanto, está predestinado a la manipulación móvil.
Además, este brazo robótico también se puede utilizar, por supuesto, de forma independiente, por lo que se puede pedir como opción la placa adaptadora correspondiente (Placa base-02).
El OpenManipulator se basa en servomotores DYNAMIXEL de la serie X en combinación con el OpenCR1.0 como unidad de control. Los servomotores que se pueden utilizar van desde la serie XL430 hasta la XM430 y la XH430, que pueden funcionar con hasta 24 V si se selecciona la serie V. Esto significa que este brazo robótico ya puede utilizarse en pequeñas aplicaciones industriales.
Cuando utilices el OpenManipulator independientemente del TB3 Waffle Pi, se recomienda añadir el denominado Kit autónomo ROBOTIS OpenManipulator. Incluye la Placa Base-02 y la fuente de alimentación correspondiente.
Turtlebot 3 Waffle Pi
El OpenManipulator no sólo se ha desarrollado como dispositivo independiente, sino que también puede funcionar en combinación con el Turtlebot 3 Waffle Pi. Por supuesto, el brazo robótico es de código abierto y la integración está totalmente documentada.
Datos técnicos
Enlaces de descarga e instrucciones
Volumen de suministro
- OpenManipulador ROBOTIS
- Juego de cables y accesorios