








Dobot X-Trainer / Teleoperationsroboter
incl. IVA más gastos de envío
1-3 días laborables
Somos conocidos por
- Dual-Arm Teleoperation für AI-Training
- Ideal für Imitation Learning und Datenerfassung
- Mit Kamerasystem und offenen APIs für Entwicklung









- Nº de artículo F25111125

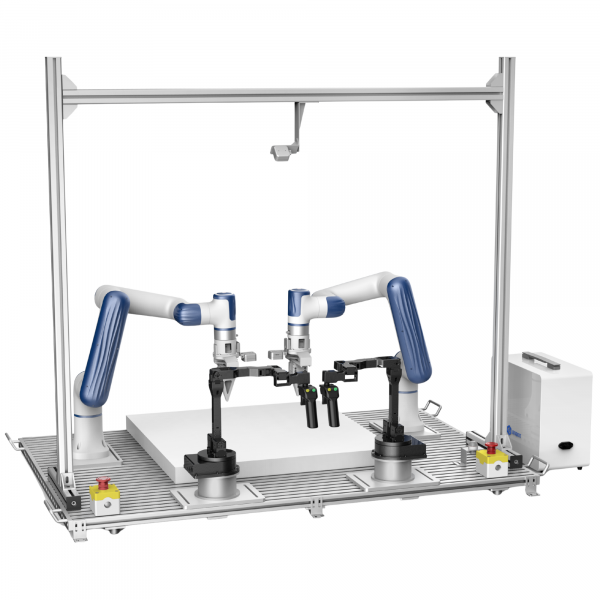
Dobot X-Trainer – AI Training Robot für Teleoperation & Imitation Learning
Der Dobot X-Trainer ist eine dual-armige Teleoperation-Plattform zur schnellen Datenerfassung und zum Training von Embodied-Intelligence-Modellen. Über haptische Master-Hands werden Demonstrationen präzise aufgezeichnet (Positionen, Bilder und Videos) und anschließend für Imitation Learning bzw. Behavior Cloning genutzt. Das System eignet sich ideal für Forschung, Lehre, Robotiklabore und praxisnahe AI-Trainingsumgebungen.
Typische Einsatzfelder
- AI Data Collection und Training für Embodied Intelligence
- Datenerfassung von Bild-, Video- und Bewegungsdaten für Robotikmodelle
- Szenario-Training für Greifen, Platzieren und einfache Manipulationsaufgaben
- Robotik-Forschung, Universitäten, AI-Labore und Wettbewerbe
- Entwicklung autonomer Manipulationsmodelle durch Demonstration
Highlights des Systems
- Dual-Arm Teleoperation mit zwei kollaborativen 6-Achs-Robotern
- Schnelles Imitation Learning durch Demonstrationsaufzeichnung
- Industrial-Grade Präzision mit bis zu ±0,05 mm Wiederholgenauigkeit
- End-to-End Motion Interface mit bis zu 25 Hz
- 3D Depth Kameras für visuelle Trainingsdaten aus mehreren Perspektiven
- Offenes SDK und API für Datenerfassung, Training und Inference
- Sicherheitsfunktionen wie Kollisionsdetektion und Dual-Not-Aus
Datenerfassung & Entwicklung (SDK / API)
Der Dobot X-Trainer unterstützt eine vollständige Pipeline von der Demonstration bis zur autonomen Ausführung. Über offene API-Schnittstellen können Entwickler Bewegungsdaten, Bilddaten und Greiferzustände erfassen und in eigene Machine-Learning-Workflows integrieren.
- API Zugriff auf Gelenkwinkel und TCP-Position
- Steuerung von Greiferhub und Roboterbewegungen
- Erfassung von RGB-Bilddaten über integrierte Kameras
- Export von Trainingsdatensätzen für Embodied-AI-Modelle
- Integration in eigene Python- oder AI-Framework-Workflows
Technische Eigenschaften
- Roboterarme: 2x Dobot Nova 2
- Achsen: 6 DOF pro Arm
- Traglast: 2 kg pro Arm (kombiniert bis 3 kg)
- Reichweite: 625 mm Arbeitsradius pro Arm
- Dual-Arm Arbeitsbereich: bis ca. 1200 mm
- Wiederholgenauigkeit: ±0,05 mm
- Maximale Geschwindigkeit: bis 1,6 m/s
- Master Hands: 2x Teleoperation Controller mit 6 DOF
- Arbeitsradius Master Hand: 437 mm
- Gewicht Master Hand: ca. 1 kg
- Bedienung: Unlock Button und Record Button
- Greifer: Öffnungsweite bis 95 mm
- Klemmkraft: 0–15 N
- Gewicht Greifer: ca. 0,6 kg
- Kameras: 3x Depth-Sensing Kameras
- Depth Field of View: 87° × 58°
- Depth Auflösung: bis 1280 × 720
- Kamera Schnittstellen: USB 2.0 / USB 3.1
- Kommunikation Basis: Ethernet TCP/IP
- Basisgewicht: ca. 85 kg
- Material Basis: Aluminiumlegierung und Metall
- Not-Aus: 2x Emergency Stop
- Stromversorgung Eingang: 100–240 V AC 50/60 Hz
- Betriebstemperatur: 0–40 °C
- Luftfeuchtigkeit: 25–85 % (nicht kondensierend)
Lieferumfang
- 2x Teleoperations-Masterhand
- 2x Dobot Nova 2 Roboterarm
- 2x Roboter-Greifer
- 3x Tiefenkamera (Depth-Sensing)
- 1x Basisstation mit Kamerahalterung
Dobot X-Trainer – AI Training Robot für Teleoperation & Imitation Learning
Der Dobot X-Trainer ist eine dual-armige Teleoperation-Plattform zur schnellen Datenerfassung und zum Training von Embodied-Intelligence-Modellen. Über haptische Master-Hands werden Demonstrationen präzise aufgezeichnet (Positionen, Bilder und Videos) und anschließend für Imitation Learning bzw. Behavior Cloning genutzt. Das System eignet sich ideal für Forschung, Lehre, Robotiklabore und praxisnahe AI-Trainingsumgebungen.
Typische Einsatzfelder
- AI Data Collection und Training für Embodied Intelligence
- Datenerfassung von Bild-, Video- und Bewegungsdaten für Robotikmodelle
- Szenario-Training für Greifen, Platzieren und einfache Manipulationsaufgaben
- Robotik-Forschung, Universitäten, AI-Labore und Wettbewerbe
- Entwicklung autonomer Manipulationsmodelle durch Demonstration
Highlights des Systems
- Dual-Arm Teleoperation mit zwei kollaborativen 6-Achs-Robotern
- Schnelles Imitation Learning durch Demonstrationsaufzeichnung
- Industrial-Grade Präzision mit bis zu ±0,05 mm Wiederholgenauigkeit
- End-to-End Motion Interface mit bis zu 25 Hz
- 3D Depth Kameras für visuelle Trainingsdaten aus mehreren Perspektiven
- Offenes SDK und API für Datenerfassung, Training und Inference
- Sicherheitsfunktionen wie Kollisionsdetektion und Dual-Not-Aus
Datenerfassung & Entwicklung (SDK / API)
Der Dobot X-Trainer unterstützt eine vollständige Pipeline von der Demonstration bis zur autonomen Ausführung. Über offene API-Schnittstellen können Entwickler Bewegungsdaten, Bilddaten und Greiferzustände erfassen und in eigene Machine-Learning-Workflows integrieren.
- API Zugriff auf Gelenkwinkel und TCP-Position
- Steuerung von Greiferhub und Roboterbewegungen
- Erfassung von RGB-Bilddaten über integrierte Kameras
- Export von Trainingsdatensätzen für Embodied-AI-Modelle
- Integration in eigene Python- oder AI-Framework-Workflows
Technische Eigenschaften
- Roboterarme: 2x Dobot Nova 2
- Achsen: 6 DOF pro Arm
- Traglast: 2 kg pro Arm (kombiniert bis 3 kg)
- Reichweite: 625 mm Arbeitsradius pro Arm
- Dual-Arm Arbeitsbereich: bis ca. 1200 mm
- Wiederholgenauigkeit: ±0,05 mm
- Maximale Geschwindigkeit: bis 1,6 m/s
- Master Hands: 2x Teleoperation Controller mit 6 DOF
- Arbeitsradius Master Hand: 437 mm
- Gewicht Master Hand: ca. 1 kg
- Bedienung: Unlock Button und Record Button
- Greifer: Öffnungsweite bis 95 mm
- Klemmkraft: 0–15 N
- Gewicht Greifer: ca. 0,6 kg
- Kameras: 3x Depth-Sensing Kameras
- Depth Field of View: 87° × 58°
- Depth Auflösung: bis 1280 × 720
- Kamera Schnittstellen: USB 2.0 / USB 3.1
- Kommunikation Basis: Ethernet TCP/IP
- Basisgewicht: ca. 85 kg
- Material Basis: Aluminiumlegierung und Metall
- Not-Aus: 2x Emergency Stop
- Stromversorgung Eingang: 100–240 V AC 50/60 Hz
- Betriebstemperatur: 0–40 °C
- Luftfeuchtigkeit: 25–85 % (nicht kondensierend)
Lieferumfang
- 2x Teleoperations-Masterhand
- 2x Dobot Nova 2 Roboterarm
- 2x Roboter-Greifer
- 3x Tiefenkamera (Depth-Sensing)
- 1x Basisstation mit Kamerahalterung